

A multi-natural sensing parameter fusion processing method for intelligent environment carrying robot to identify floors
A parameter fusion and intelligent environment technology, applied in data processing applications, electrical digital data processing, special data processing applications, etc., can solve frequent errors and other problems, achieve prediction model stability, high universality, and improve global search capabilities Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
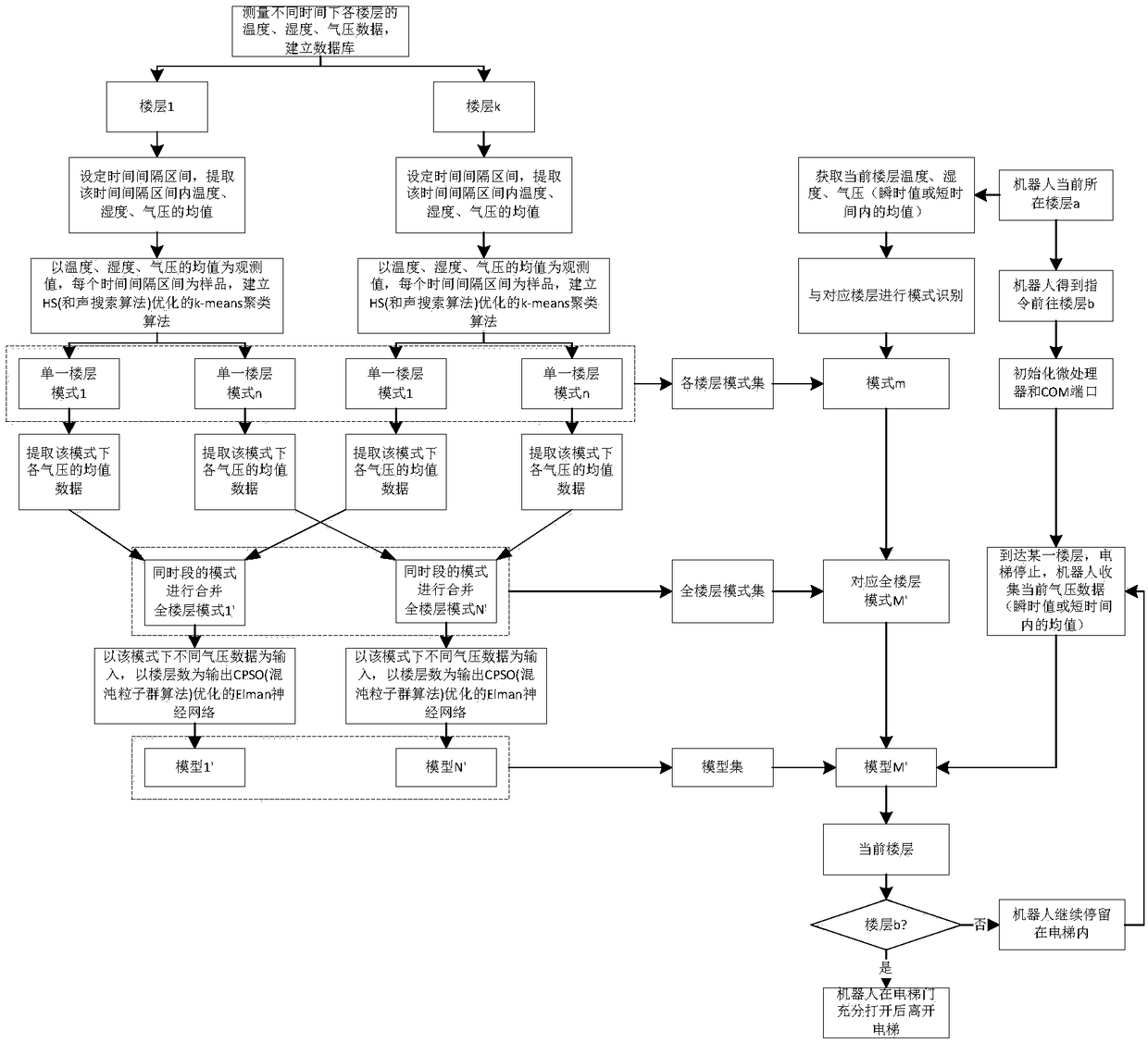
[0048] Such as figure 1 As shown, a multi-natural sensing parameter fusion processing method for an intelligent environment carrying robot to identify a floor includes the following steps:
[0049] Step 1. Before the robot is put into use, collect the temperature, humidity, and air pressure data of each floor of the building at different times, establish a database, and keep the database updated after the robot is put into use. Take a 10-story building as an example.
[0050] Step 2. Number the floors as Floor 1-Floor 10, and classify the data according to different floors.
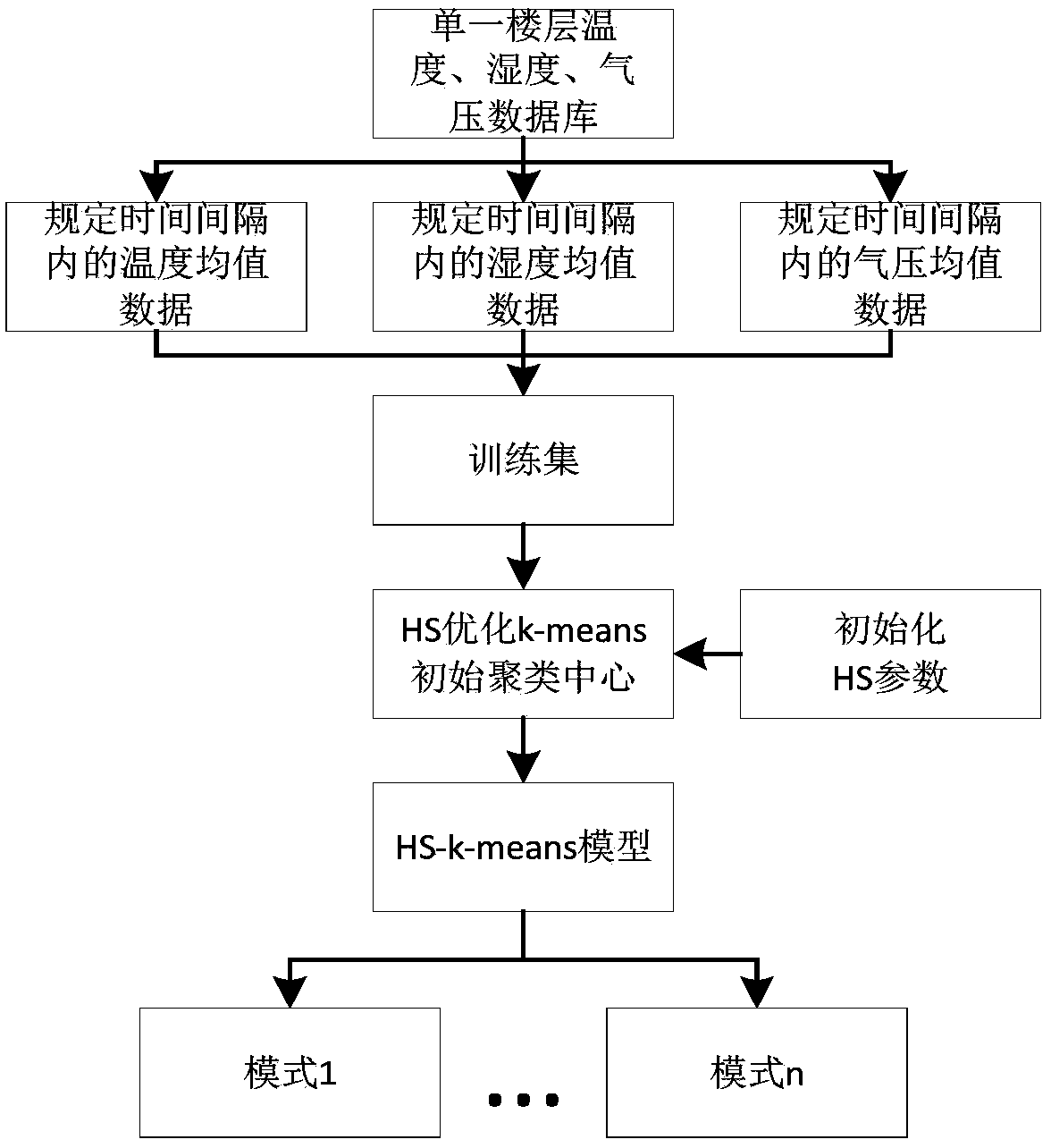
[0051] Step 3. Set the hourly interval between two adjacent full points as the time interval, and extract the average values of temperature, humidity, and air pressure on the 10 floors within each hour.
[0052] Step 4. For each single floor, take the mean value of temperature, humidity, and air pressure as the observed value, and take the observed value of each time interval as the sample, then floor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More