

Robot active force compliance pinhole butt joint assembly method based on Hertz elasticity model
An elastic model and assembly method technology, which is applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to meet the requirements of safe and stable assembly, and achieve the effect of improving force compliance control, improving assembly quality and assembly efficiency, and improving force. The effect of softness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings, but this is only exemplary and not intended to limit the protection scope of the present invention.
[0031] Such as figure 1 As shown, in the docking assembly method of the present invention, the shape of the docking pin is a combination of a cylinder and a conical assembly circumscribed on the end surface of the cylinder. The pin size is determined according to the specification of the mounting fastener for the equipment being installed.
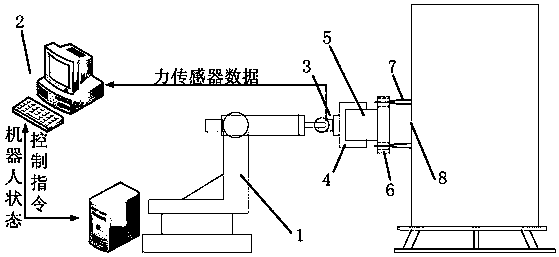
[0032] Such as figure 2 As shown, the force-compliant assembly system implementing the method of the present invention includes an industrial robot 1, a control computer 2, a six-dimensional force sensor 3, a transfer tool 4, an installed device 5, and a docking mechanism (including a docking hole 6 and a docking pin 7), The docking pin is installed on the docking plane 8 in advance. Among them, the industrial robot (in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More