

Steering controller and control method for differential steering vehicle based on driver model
A driver model, steering controller technology, applied in the direction of automatic steering control components, vehicle components, steering mechanisms, etc., can solve the problems affecting the accuracy of steering control and the number of steering radii, etc., to meet the needs of autonomous steering motion and ensure fast speed sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principles of the present invention.
[0051] A specific embodiment of the present invention discloses a steering controller for a speed difference steering vehicle based on a driver model.
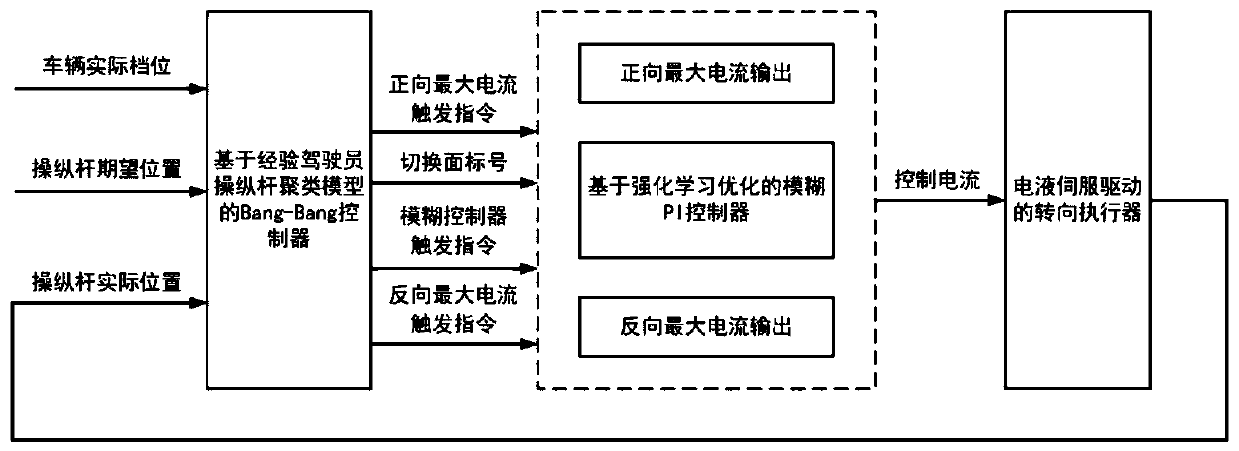
[0052] Such as figure 1 As shown, the driver model-based differential steering vehicle steering controller consists of two main parts, namely the Bang-Bang controller based on the empirical driver joystick clustering model, and the fuzzy PI based on reinforcement learning optimization. controller.
[0053] The Bang-Bang controller based on the empirical driver's joystick clustering model takes the current vehicle gear, the desired position of the joystick, and the actual position of the joystick as in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More