

Human-vehicle cooperative steering control method considering real-time allocation of driving rights
A steering control, driver's technology, applied in the direction of control devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention is described in detail below in conjunction with accompanying drawing:
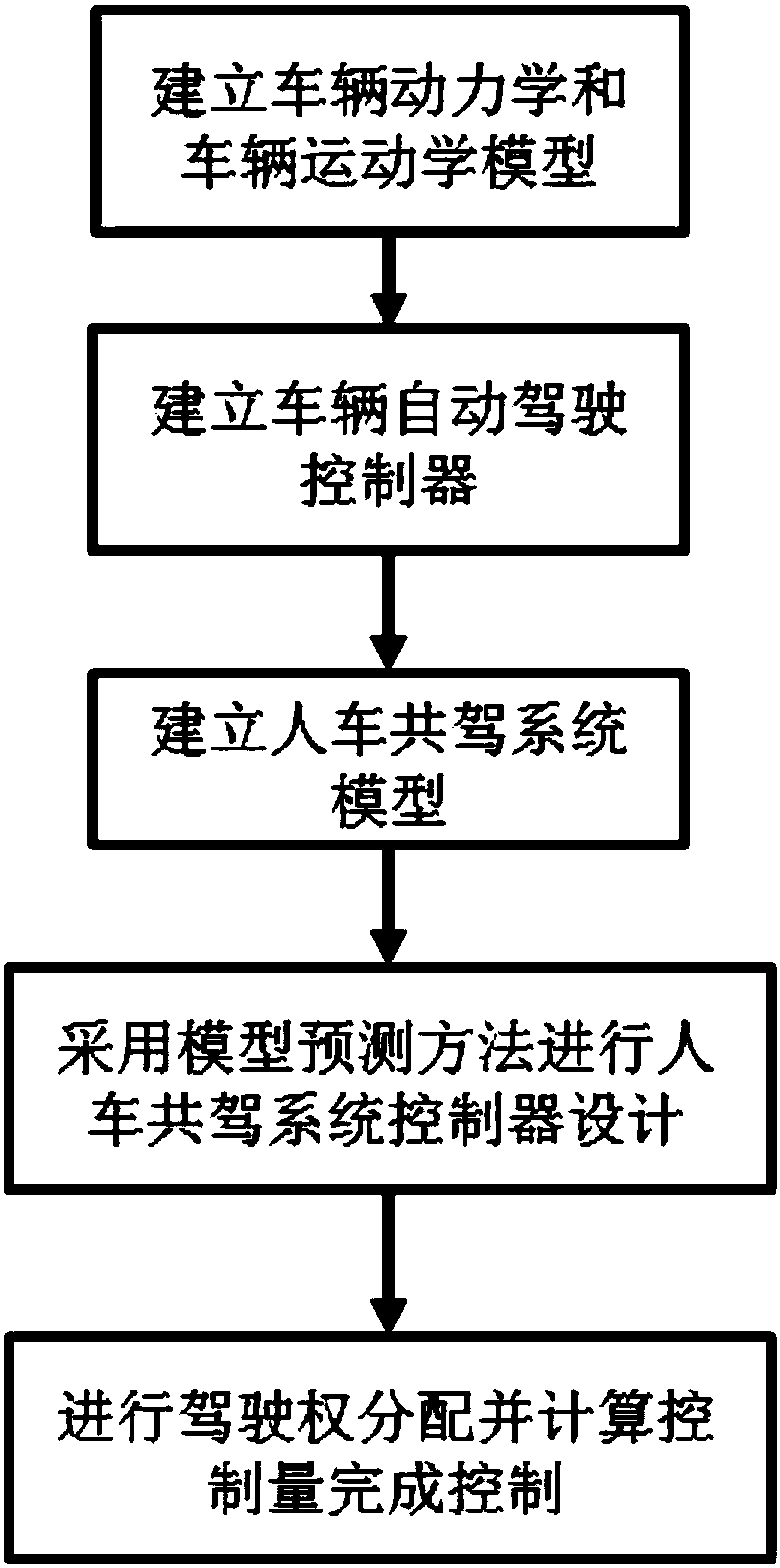
[0091] The present invention proposes a method for distributing driving rights between the driver and the vehicle automatic driving controller in real time online, such as figure 1 As shown, the specific implementation steps are as follows:
[0092] Step 1. Establish vehicle dynamics model and vehicle kinematics model:
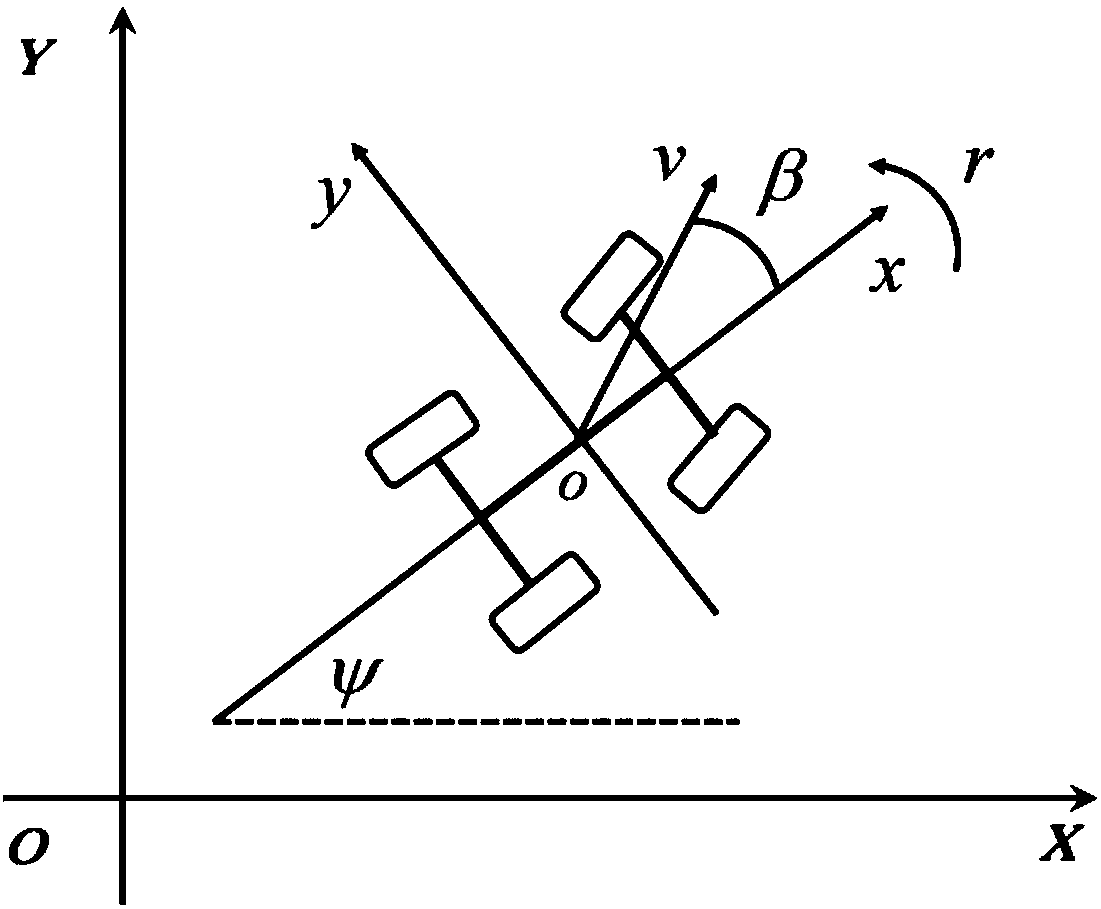
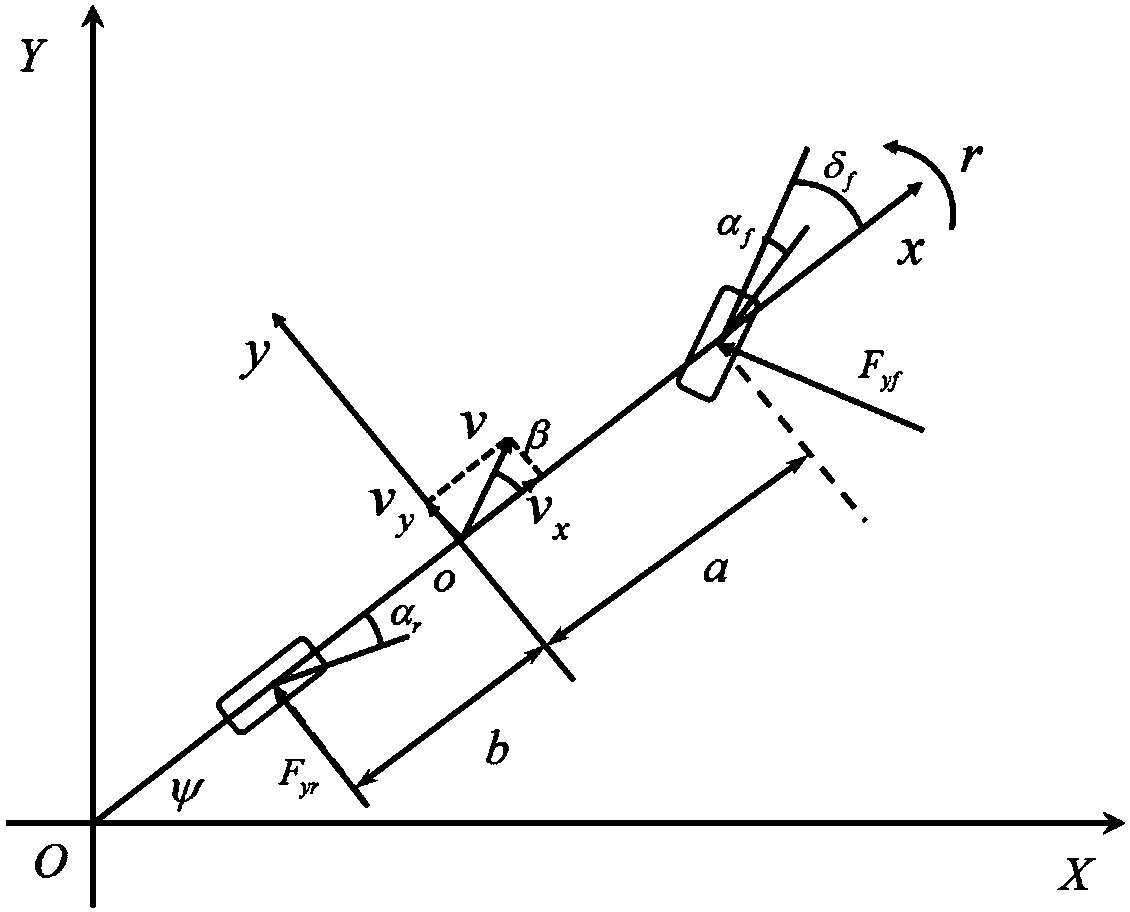
[0093] Establish a geodetic coordinate system: the origin O is fixed on the ground, the X-axis usually coincides with the initial movement direction of the vehicle, and X rotates 90 degrees counterclockwise to be the positive direction of the Y-axis;
[0094] Establish a vehicle coordinate system: take the center of mass o of the vehicle in the vehicle dynamics model as the coordinate origin, the forward direction of the vehicle is the positive direction of the x-axis, and the x-axis rotates 90 degrees counterclockwise to establish a coordinate system as the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More