Finger rehabilitation training robot
A rehabilitation training and robotic technology, which is applied to muscle training equipment, gymnastics equipment, passive exercise equipment, etc., can solve the problems of finger rehabilitation training, single exercise mode, and low safety performance for patients who cannot, and achieve better rehabilitation effect. Good, wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
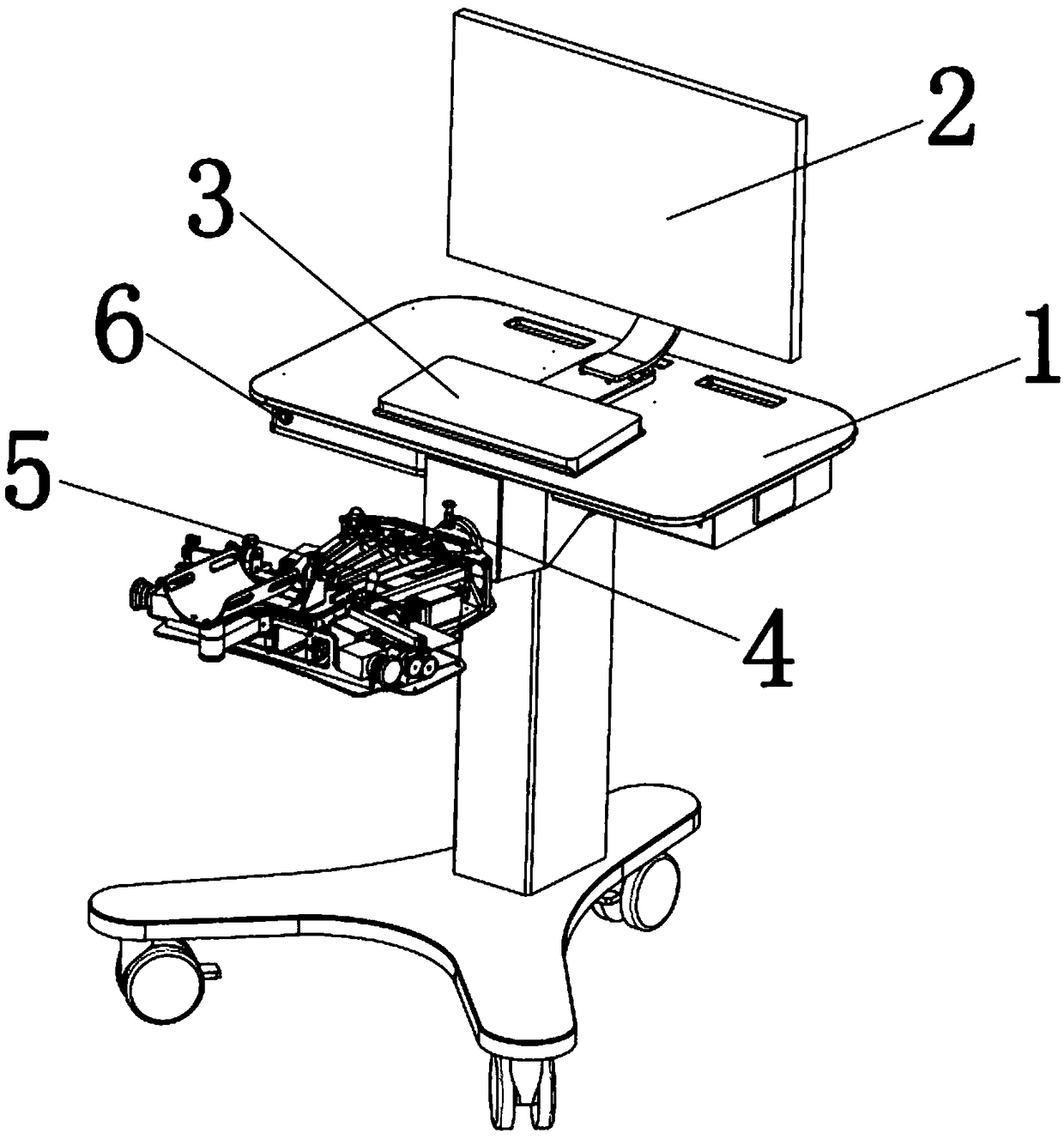
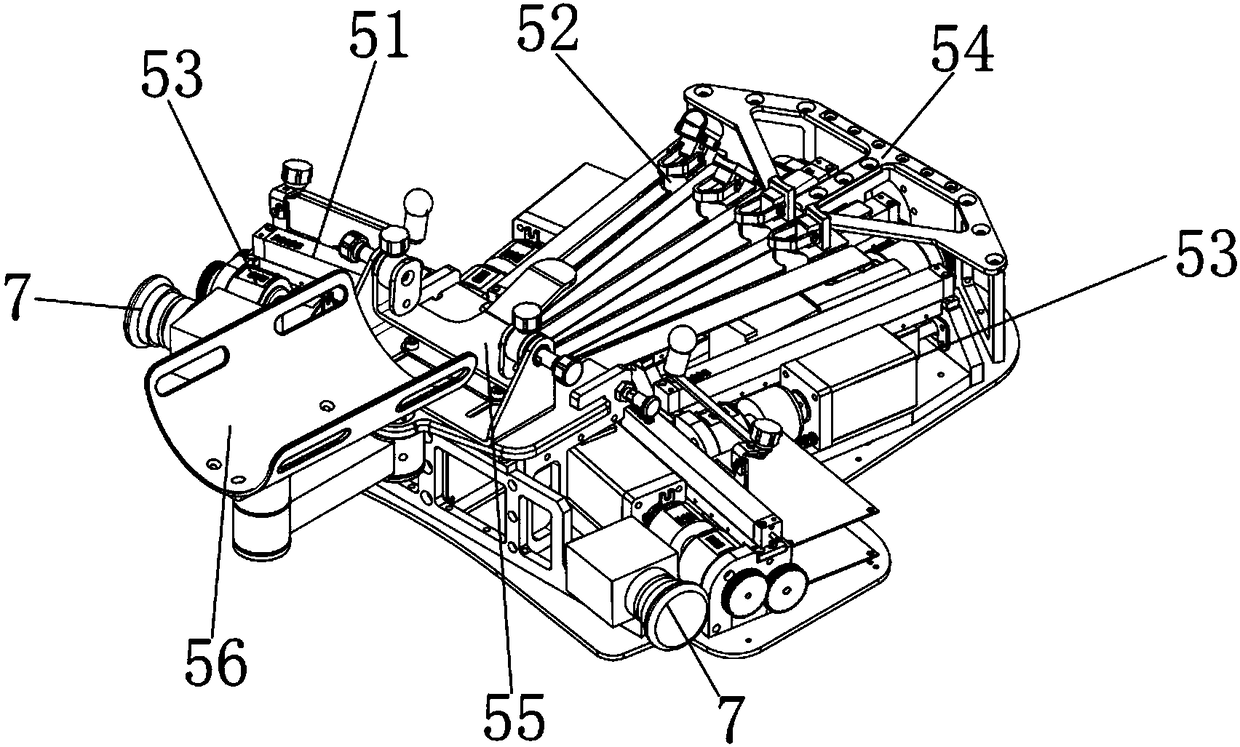
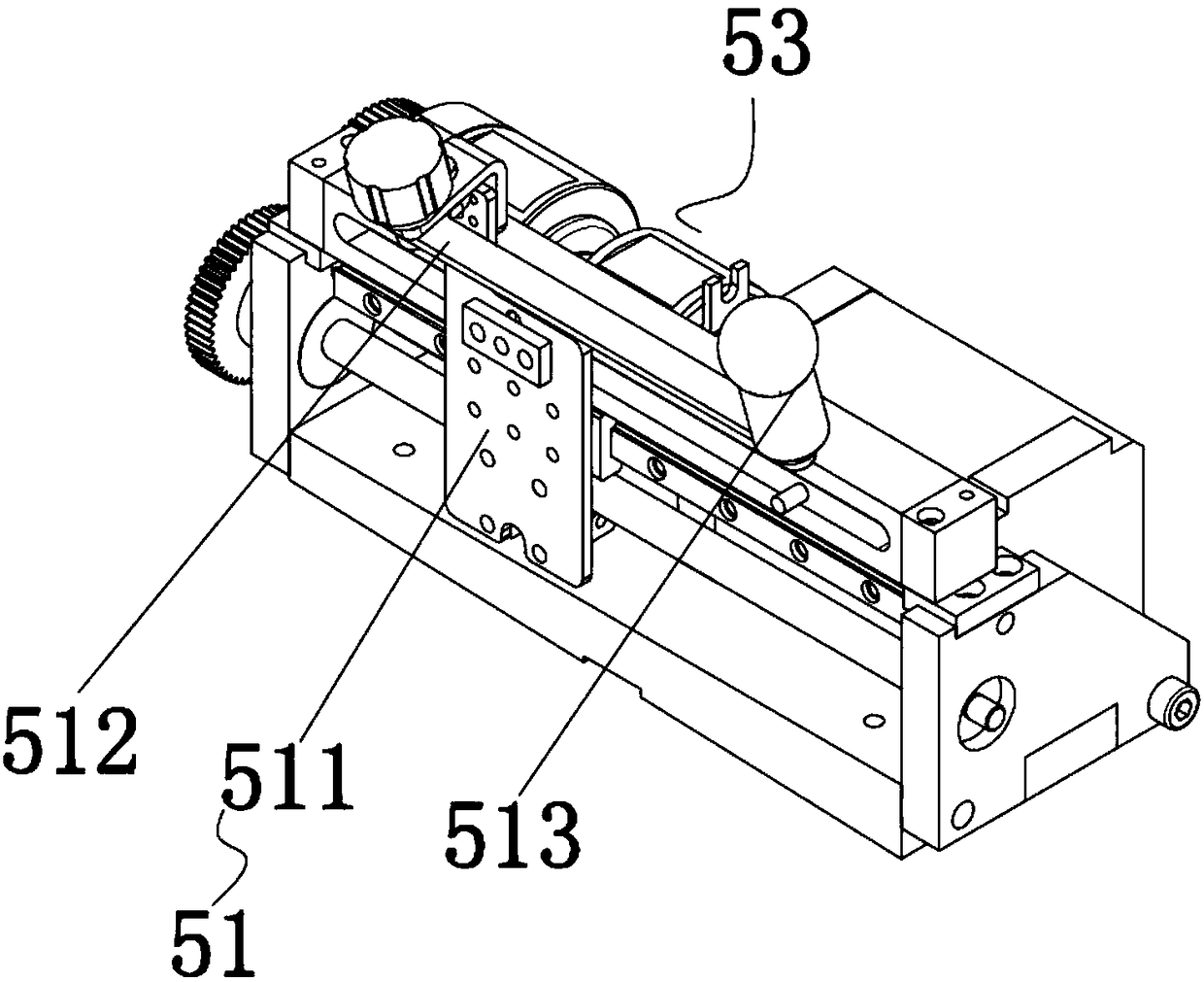
[0027] Such as Figure 1 to Figure 6 As shown, the finger rehabilitation training robot includes a lifting platform 1, a display screen and a PC host on the lifting platform 1, a keyboard 3, a finger movement device 5 connected to the lifting platform 1 through a rotating device 4, and a finger movement device 5 controlling the opening With the emergency stop switch 7, the lifting platform 1 is provided with an electrical stimulation interface 6. The finger movement device 5 includes a number of finger fixing devices, a finger drive device 53 connected to each finger fixing device, and a device for fixing the finger drive device 53 The base frame 54, the palm fixing device 55 arranged on the base frame 54, and the arm fixing device 56 connected to the palm fixing device 55. The finger driving device 53 includes a base 531 and a motor 532, a clutch 533, and a hysteresis brake on the base 531. 534, driving gear 535, driven gear 536, screw rod 537 and nut 538 connected to the scre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More