Novel object-grabbing arm-hand device used for robot and method thereof
A robot and target technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of untimely and inaccurate positioning and recognition of target objects, and robots cannot autonomously and accurately grasp, etc., to achieve the goal of autonomous fine grasping Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in more detail and complete below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
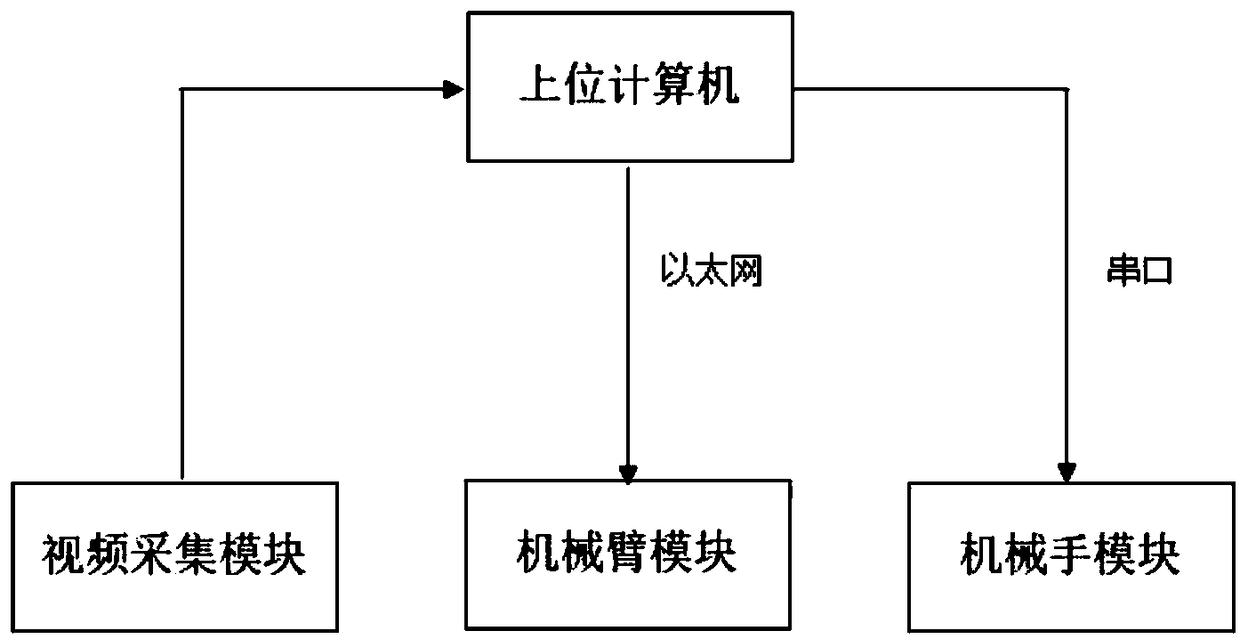
[0024] refer to figure 1 , a new arm-hand device and method for a robot to grab a target according to the present invention, wherein the device includes: a video acquisition module, a host computer, a manipulator module and a manipulator module; the video acquisition module is connected to the host computer; The upper computer is connected to the manipulator module through Ethernet; the upper computer is connected to the manipulator module through a serial port.
[0025] Wherein, what described video capture module adopted is the Kinect sensor of Microsoft, i.e. a 3D vision sensor; It is made up of an infrared (infrared radiation, IR) projector, an infrared camera and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More