

MIMO (Multiple Input and Multiple Output) decoupling control method based on SISO (Single Input and Single Output) partial format model-free controller and partial derivative information
A decoupled control, model-free technique used in adaptive control, general control systems, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
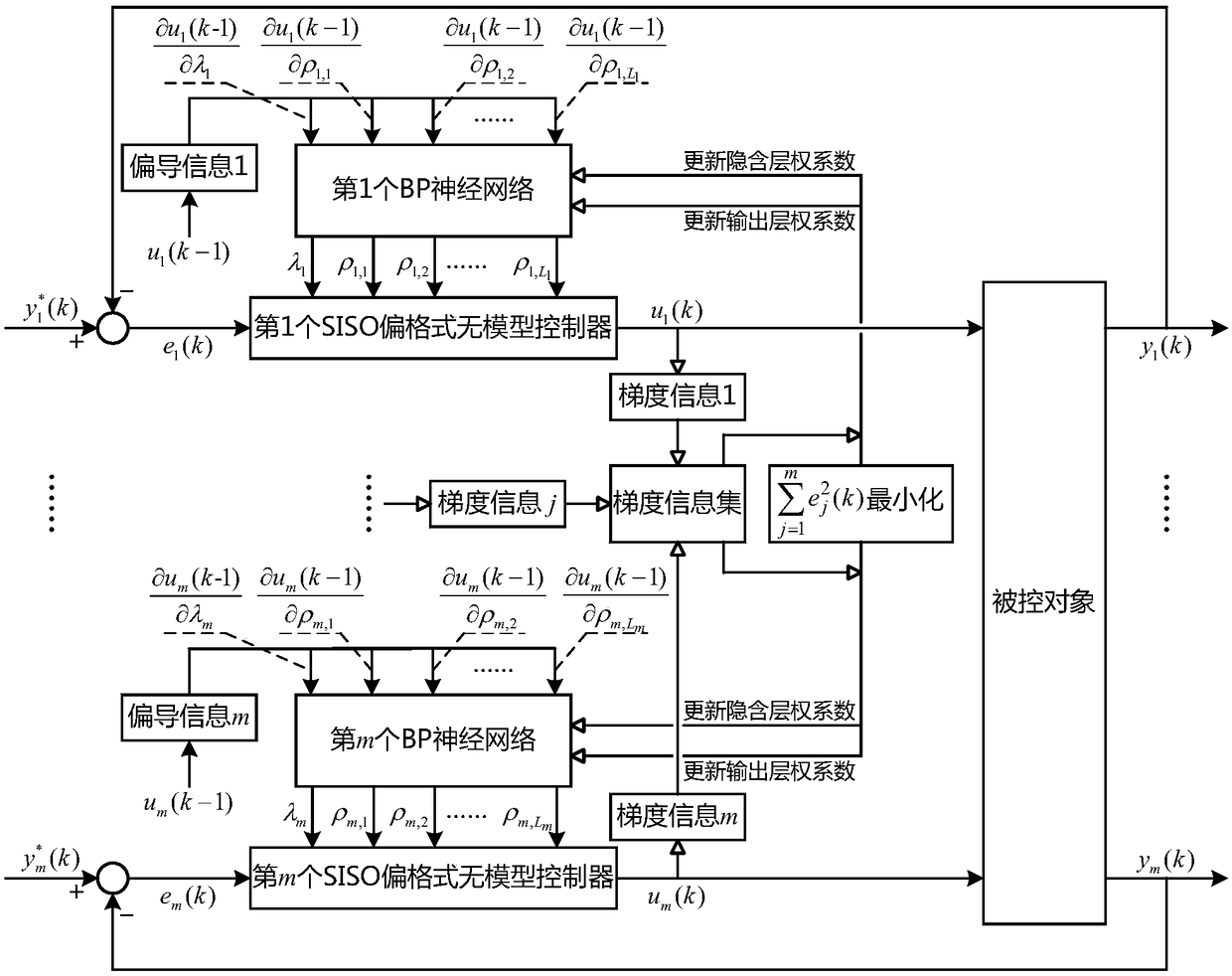
[0056] figure 1 The principle block diagram of the present invention is given. According to the coupling characteristics and tendency characteristics of the MIMO system, select an input and an output to form a SISO system, repeat m times, and decompose the MIMO system into m mutually coupled SISO systems, and any one of the SISO systems The input is not used as the input of other SISO systems, and the output of any SISO system is not used as the output of other SISO systems; m SISO systems are controlled by m SISO partial scheme model-free controllers.
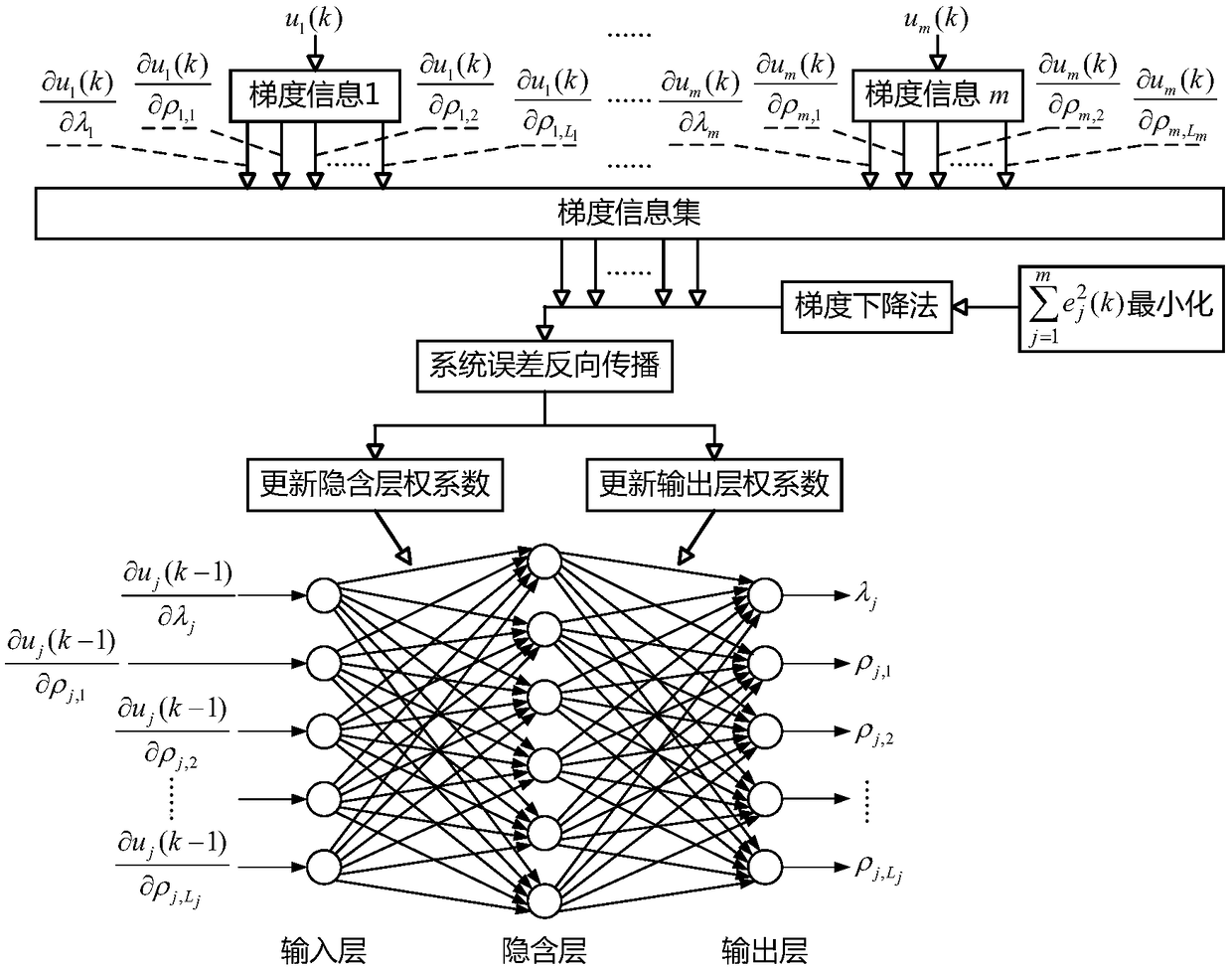
[0057] For the jth (1≤j≤m) SISO partial scheme model-free controller, determine its control input linearization length constant L j , L j is an integer greater than 1; the jth SISO partial form model-free controller parameter contains the penalty factor λ j and step factor Determine the j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More