

Control method of electro-hydraulic position servo system based on disturbance compensation
An electro-hydraulic position servo and disturbance compensation technology, which is applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of unobservable matching disturbance, unfavorable engineering practice, cumbersome design process, etc., and achieve the interference estimation method The effect of convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
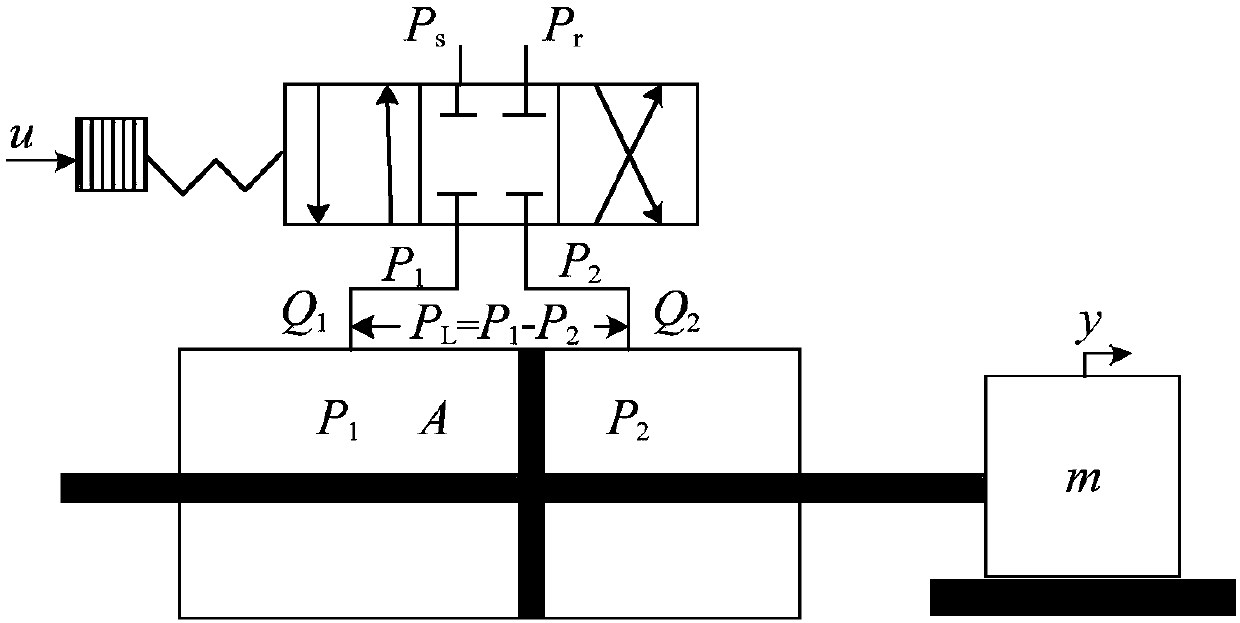
[0083] The parameter values of the motor servo system are as follows:
[0084] m=30kg, B=10N·m·rad-1·s -1 , V t =7.962e -5 m 3 , β e =700e 6 pa, D m =9e -4 m 2 , C t =3e -12 m 3 / s / pa,k t =1.18e -8 m 3 / s / V / pa -1 / 2 , P s =10e 6 pa.
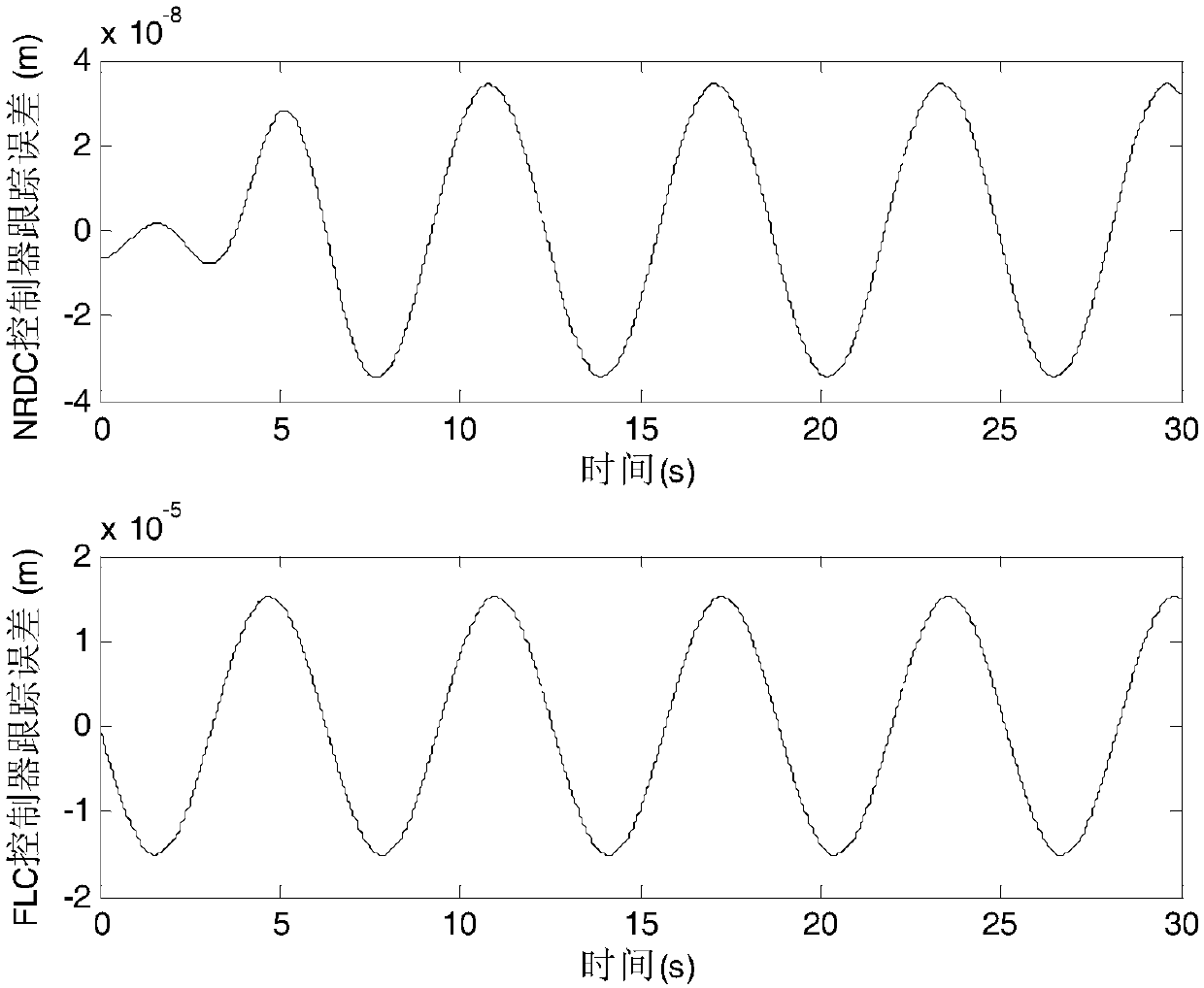
[0085] In order to verify the control performance of the controller, the controller proposed by the present invention is named NRDC controller, and the controller used for comparison is named FLC controller. The two controllers have the same expression but different parameters. There is no disturbance compensation term for disturbance in the FLC controller.
[0086] NRDC controller parameter k 1 =1000,k 2 =2000,k 3 =1000,λ 1 =100,λ 2 =2000.
[0087] The FLC controller parameter is k 1 =1000,k 2 =2000,k 3 =1000,λ 1 =0,λ 2 =0.
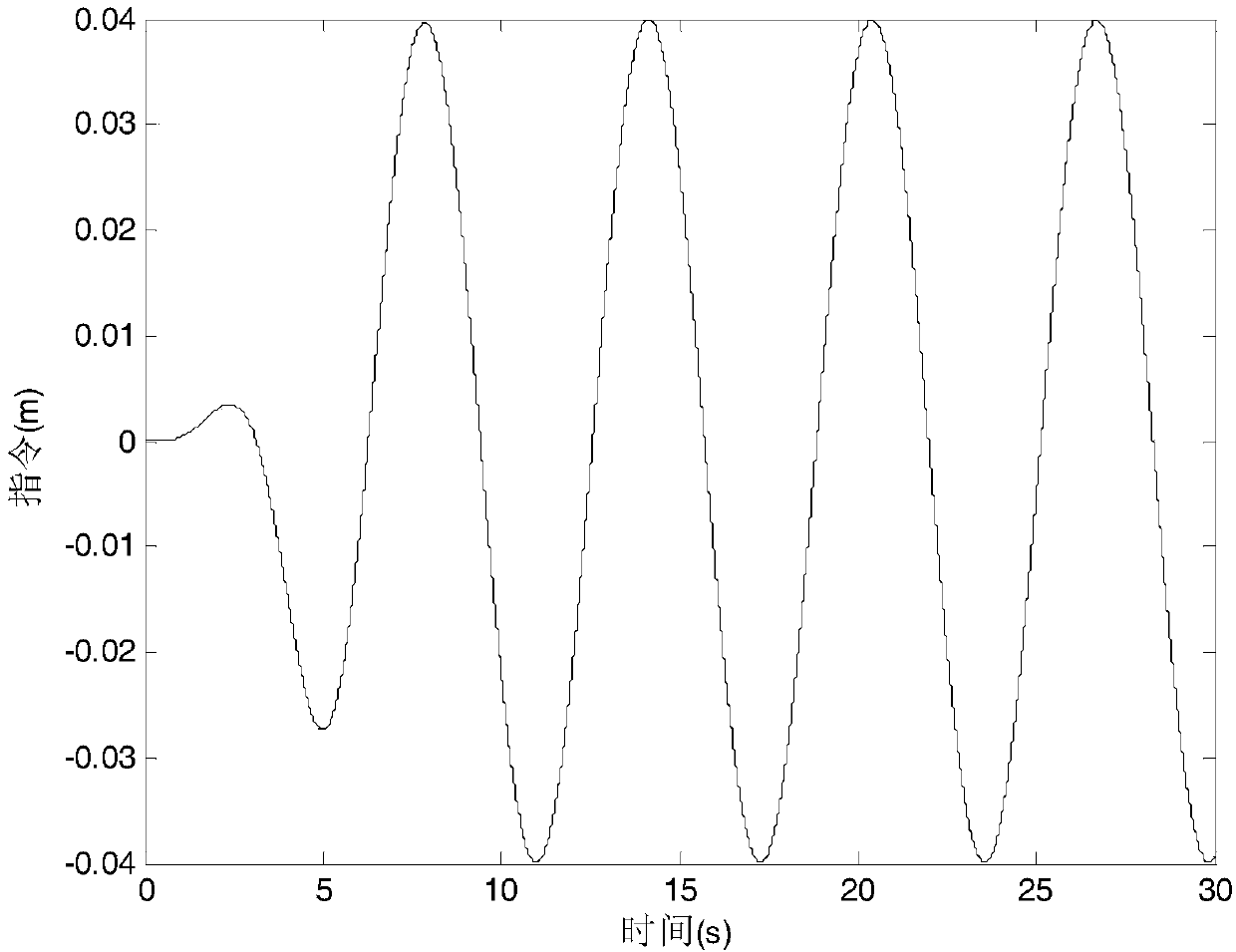
[0088] Position command signal x 1d (t)=0.04sin(t)·[1-exp (-0.01t3) ]
[0089] figure 2 is the position command signal diagram, image 3 is the curve of the tracking error of the two con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More