

Unmanned vehicle avoidance method, device and electronic device
An unmanned vehicle and vehicle technology, applied in the field of unmanned driving, can solve problems such as insufficient road width and inability to achieve avoidance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0098] Embodiment 1: When the vehicle has a high-precision map, the road width data is obtained from the map data, and the width of the backward road is searched to obtain the width of the road behind the vehicle.
Embodiment 2
[0099] Embodiment 2: When the vehicle does not have a high-precision map, the vehicle itself continuously measures the width of the road, and in combination with the map route, continuously records the route for a certain period of time (for example, 30 minutes) or within a certain distance range (for example, within 800 meters). road width data. The recorded data includes the driving route map, the GPS position of the route where the width changes, and the road width value, so as to obtain the width of the road behind the vehicle from the recorded data.
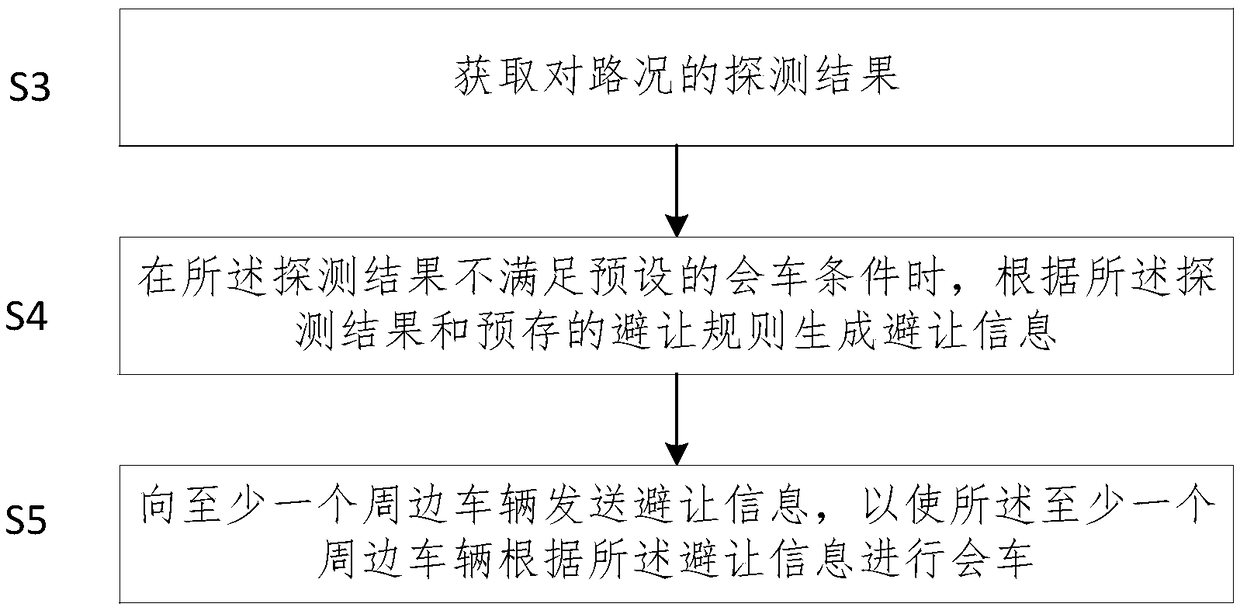
[0100] S202. Based on the width of the road behind, it is judged whether there is a possible meeting point on the road behind.
[0101] Compare the road width L with the sum C1+C2 of the widths of two-way vehicles, if L-C1-C2 is greater than the safe width.
[0102] S203, if it exists, calculate the distance between the position of the possible meeting point and the position of the own vehicle;
[0103] S204, obtaining the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More