

Advancing path planning method and device and intelligent equipment advancing path planning method and device
A technology of traveling path and grid, which is applied in the field of path planning, can solve the problems of complex cleaning equipment, complex motion control, and large volume, and achieve the effect of ensuring reasonableness and safety, and preventing collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
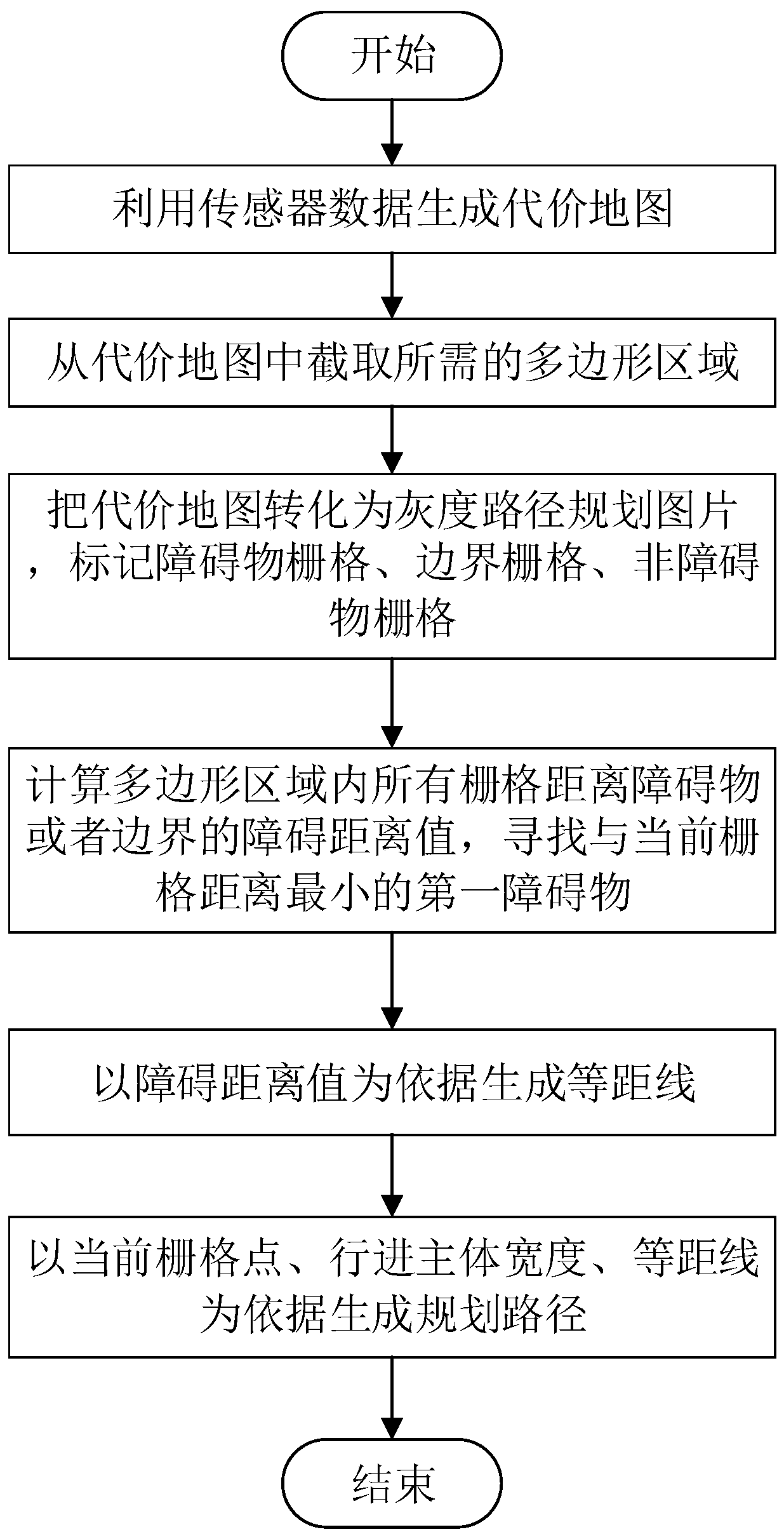
[0050] A method of traveling path planning in the present invention, such as figure 1 shown, including the following steps:
[0051] S1, start;
[0052] S2. Generate a cost map using sensor data;
[0053] S3. Intercepting the required polygonal area from the cost map;
[0054] S4. Convert the cost map including the polygonal area into a gray-scale path planning picture, and mark the obstacle grid, the boundary grid, and the non-obstacle grid;
[0055] S5. Calculate the obstacle distance value between the non-obstacle grid and the obstacle grid or the boundary grid in the polygon area, and find the first obstacle with the smallest distance from the current grid;
[0056] S6. Generating equidistance lines based on the obstacle distance value;
[0057] S7. Generate a planning path based on the current grid point, the width of the traveling body, and the equidistance line;
[0058] S8, end.
[0059] In a specific embodiment of the present application, the traveling subject i...
specific Embodiment 2
[0088] A smart device travel path planning device of the present application includes a smart device body, a sensing device, and a control center; the sensing device and the control center are installed on the smart device body, and the sensing device is used to sense surrounding environment data and The environmental data is transmitted to the control center, and the control center is used to plan the path of the smart device by using the overlay path planning method; firstly, the environmental data is converted into a grid map, and then the grid map is converted into a cost map. In the cost map Intercept the required polygonal area, use grayscale to represent the obstacle grid, non-obstacle grid, and boundary grid in the required polygonal area, select a non-obstacle grid as the current grid, and calculate the current grid and the nearest obstacle The distance of the grid, and based on this, calculate the obstacle distance of the non-obstacle grid around the current grid, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More