

Double-wheel distribution robot
A robot and two-wheel technology, applied in the field of robots, can solve the problems of weak obstacle crossing ability, poor anti-shock resistance to external force, loss of balance, etc., to achieve posture balance ability and obstacle crossing ability improvement, improve safety and reliability, The effect of improving the ability to resist turbulence and external force impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
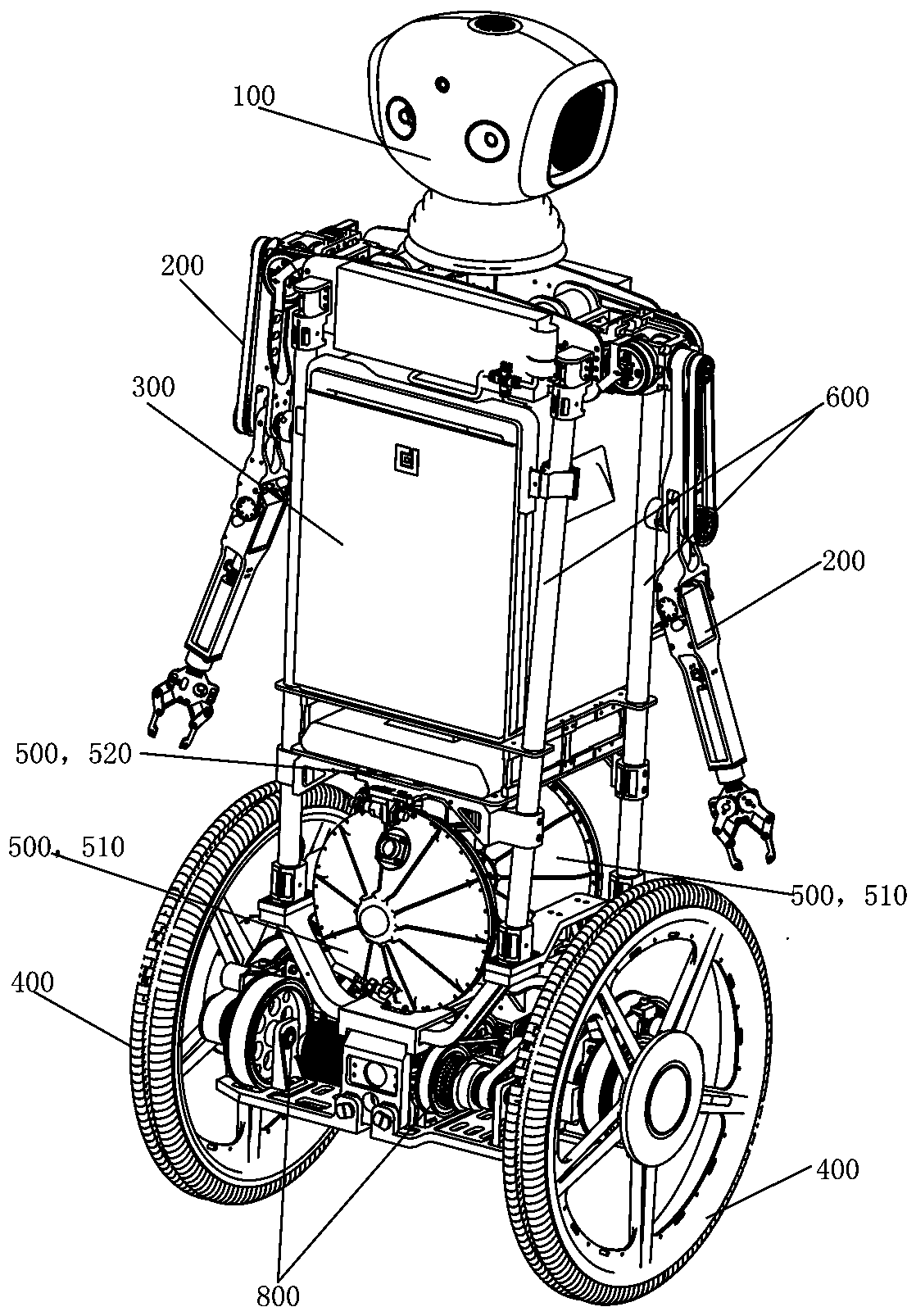
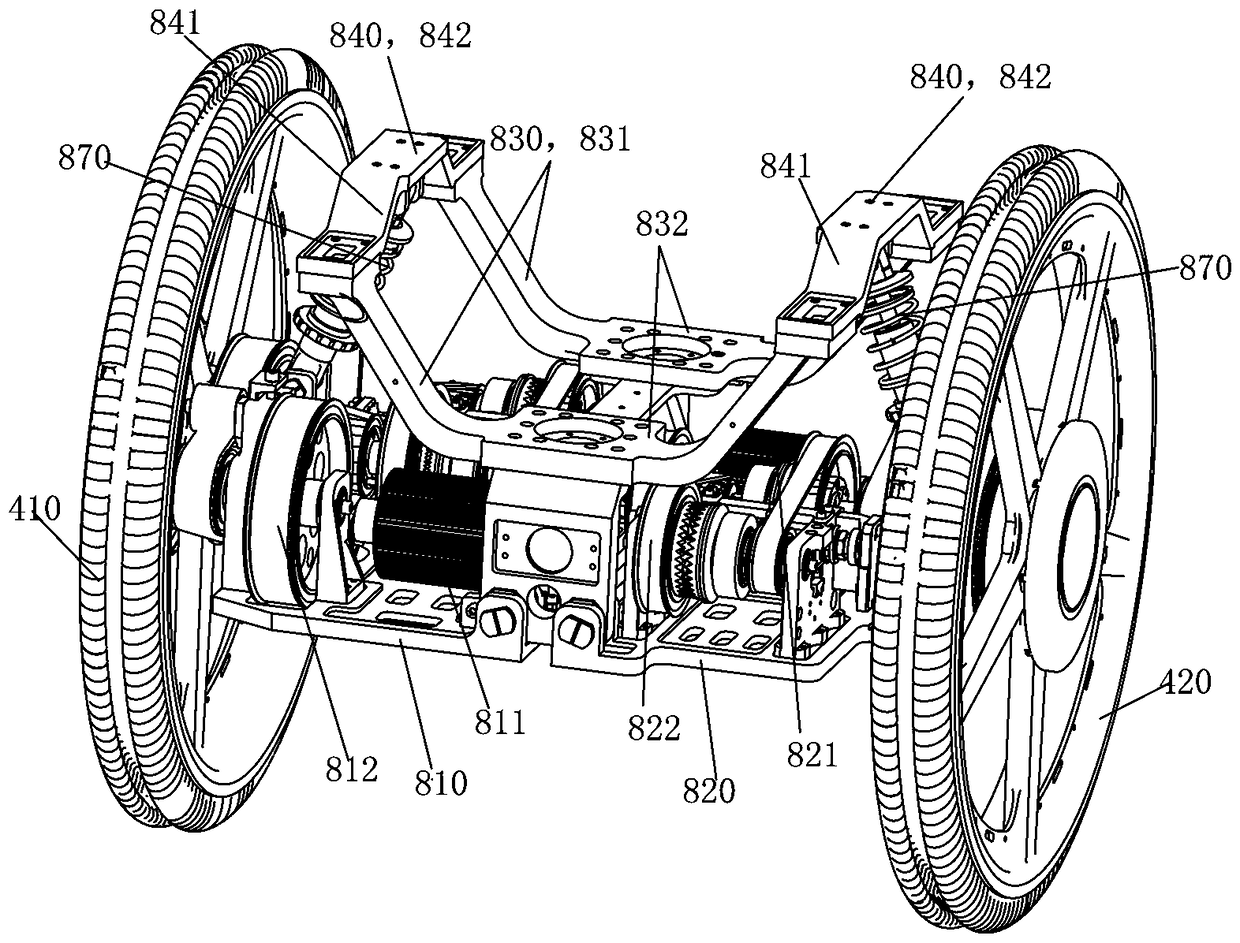
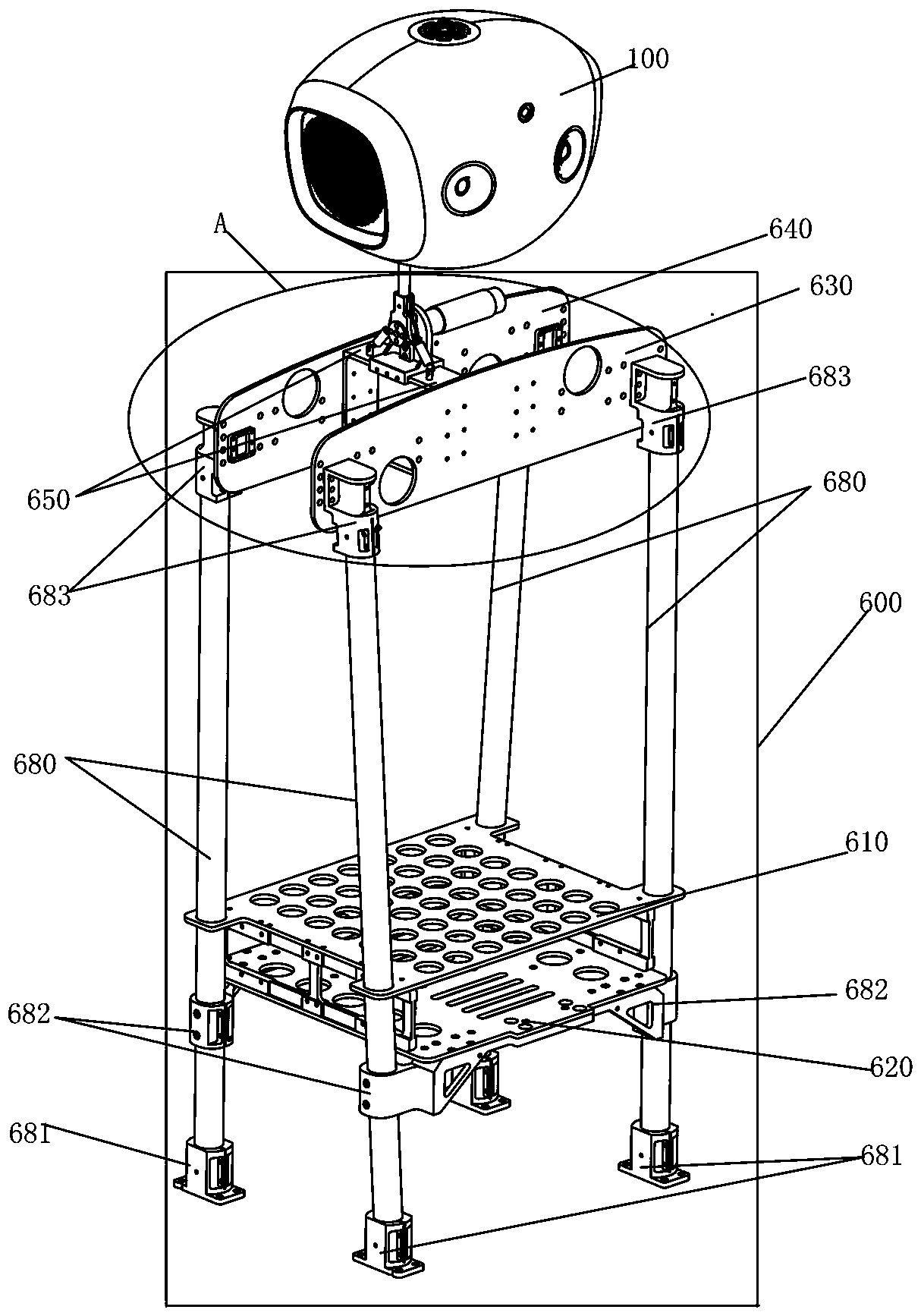
[0027] Such as figure 1 As shown, in the preferred embodiment of the two-wheel delivery robot, it includes a robot main body and two wheels 400, the robot main body includes a trunk module 600 and a main drive module 800 for driving, and the inside of the trunk module 600 is provided with a A storage box 300 for distributing items, and a control moment gyro device 500 is arranged between the storage box 300 and the main drive module 800; The yaw motor and the reverse synchronous mechanism 520 used to control the yaw speed of the two control moment gyros 510 are the same but the yaw direction is opposite; the two sides of the main body of the robot are equipped with wheel shafts, and the main drive module 800 is driven by a transmission The mechanism is connected to the wheel shaft; when the main drive module 800 is driven, the wheel is driven ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More