

A control algorithm for multi-UAV cooperative formation obstacle avoidance
A control algorithm and multi-UAV technology, applied in control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., can solve the problem of uncontrollable multi-UAV formation constraints, UAV communication interruption, Issues such as failure to complete specified tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] Embodiment 1, the present invention is a control algorithm for multi-UAV cooperative formation obstacle avoidance, which mainly includes steps:
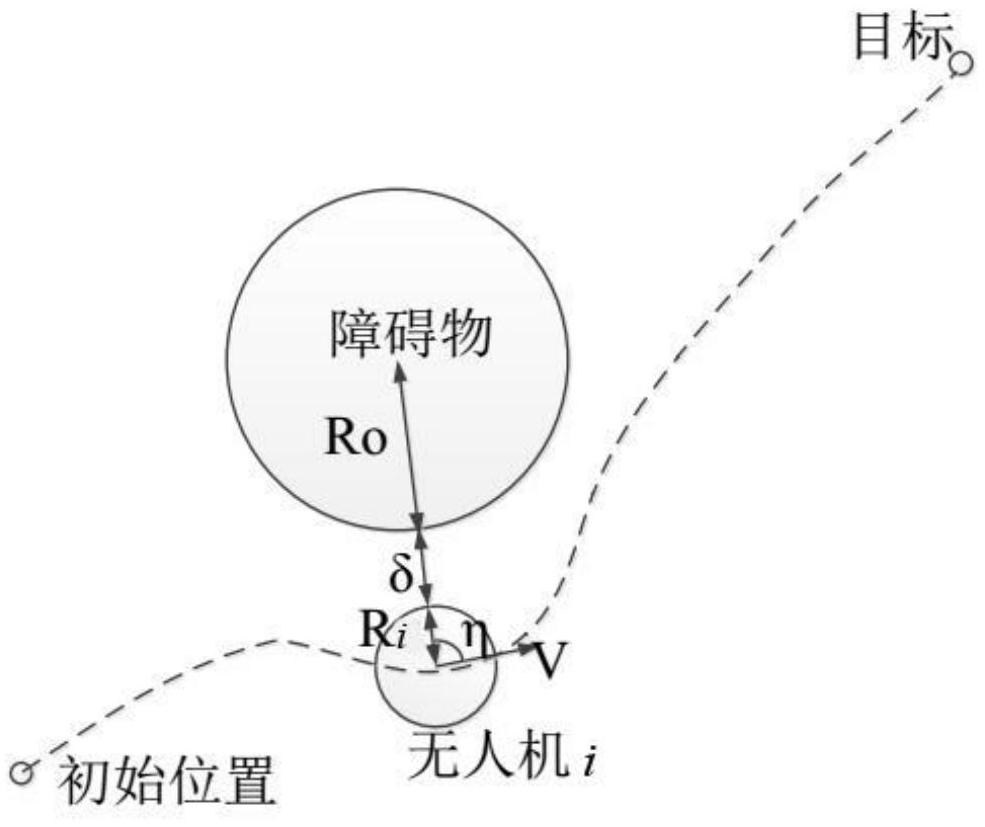
[0056] (1) When the UAV formation performs flight missions, the airborne sensors detect the position and speed information of the UAV and airspace obstacles, and transmit the detected information to the UAV control system, so that each UAV According to these information, the aircraft can perform appropriate maneuvers respectively, maintain the formation formation and avoid collision with obstacles; at the same time, for the convenience of calculation, the obstacles in the airspace are simplified and abstracted into a sphere with a certain radius.
[0057] The airborne sensor of the present invention may be any sensor disclosed in the prior art or commercially available that can be applied to the present invention, such as a laser range finder, an ultrasonic range finder.
[0058] (2) Construct a multi-UAV formation communicati...
Embodiment 2
[0117] In embodiment 2, a simulation experiment is carried out to verify the control algorithm of the present invention.
[0118] Assuming that three UAVs form a formation to avoid obstacles, the communication topology of the three UAV formations is as follows: Figure 4 As shown, the initial state and simulation parameters of each UAV are as follows:
[0119] Table 1. The initial state of each UAV
[0120]
[0121] Table 2. Physical limitations of drones
[0122]
[0123] The simulation parameters are as follows:
[0124] k 1 = 1; k 2 =0.01;k 3 = 1; k 4 = 16; δ = 5; ρ iomin = 3; k v = 1.3; k η =6.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More