

Designing method for recursion integration terminal sliding mode surface of higher-order non-linear system
A nonlinear system, terminal sliding mode technology, applied in general control systems, control/regulation systems, instruments, etc., to avoid singular value problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with accompanying drawing:
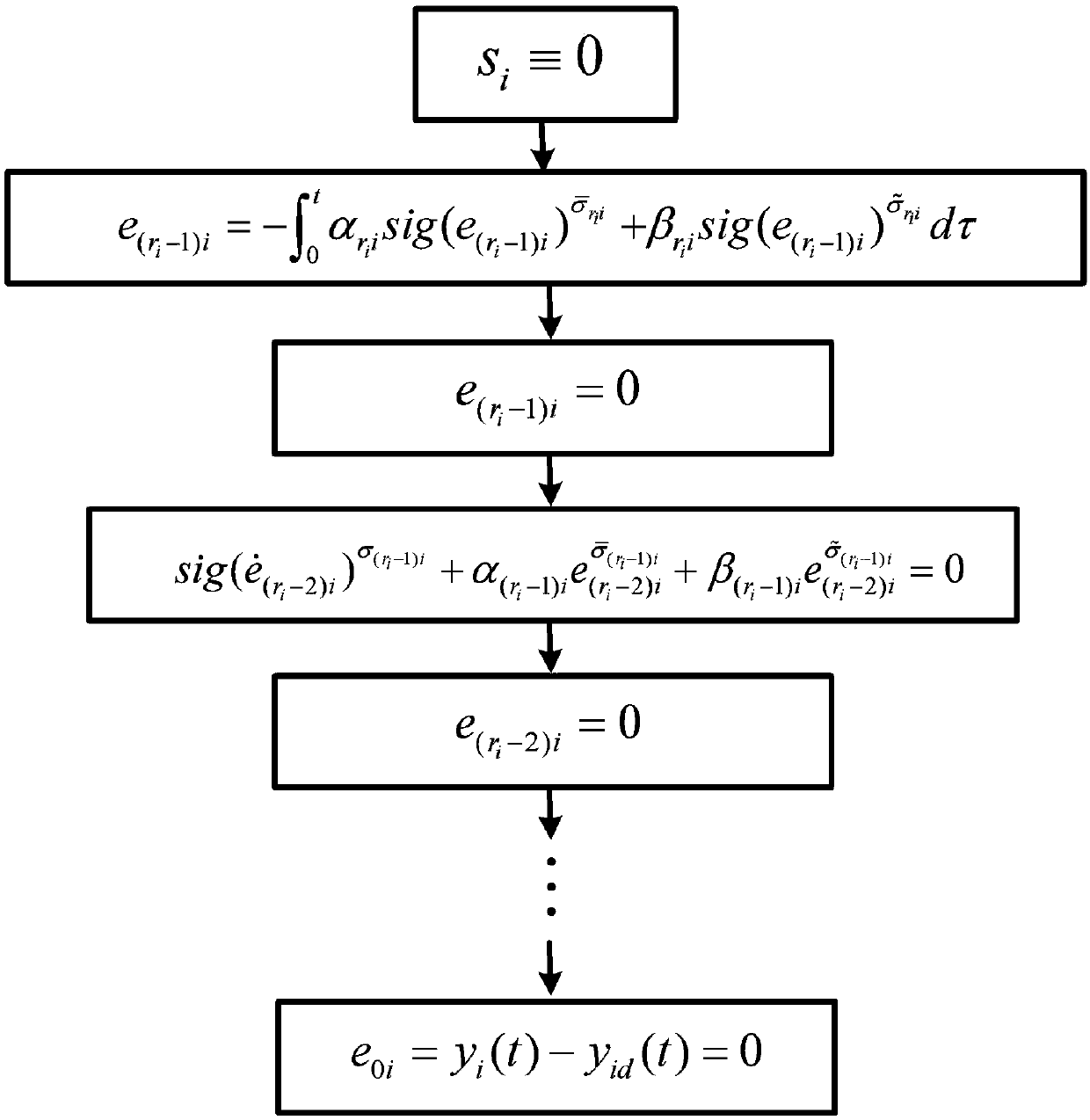
[0043] Such as figure 1 Shown, the design method of the present invention comprises the following steps:
[0044] S1. Reorganize the general multi-input-multiple output high-order system into a general high relative degree nonlinear system. For a Class of Multiple-Input-Multiple-Output High-Order Nonlinear Systems
[0045]
[0046] Among them, X(t)=[x 1 (t),x 2 (t),...,x n (t)] T ∈R n is the status information of the system;
[0047] u(t)∈[u 1 (t), u 2 (t),...,u m (t)] T is the input of the system; y(t)∈[y 1 (t),y 2 (t),...,y m (t)] Tis the output of the system; d(t) represents the external disturbance of the system; f(X(t),d(t))∈R n is a system nonlinear dynamic equation with system uncertainty and external disturbance; h(X(t))∈R m is the output equation of the system; B(X(t))∈R n×m by the smooth vector b i ∈ R m Composition is
[0048] Suppose th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More