

Control method of soft continuous robot under arbitrary spatial constraint
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems affecting the safety and reliability of robot operations, achieve convergence and stability, avoid singular value problems, and ensure uniqueness sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
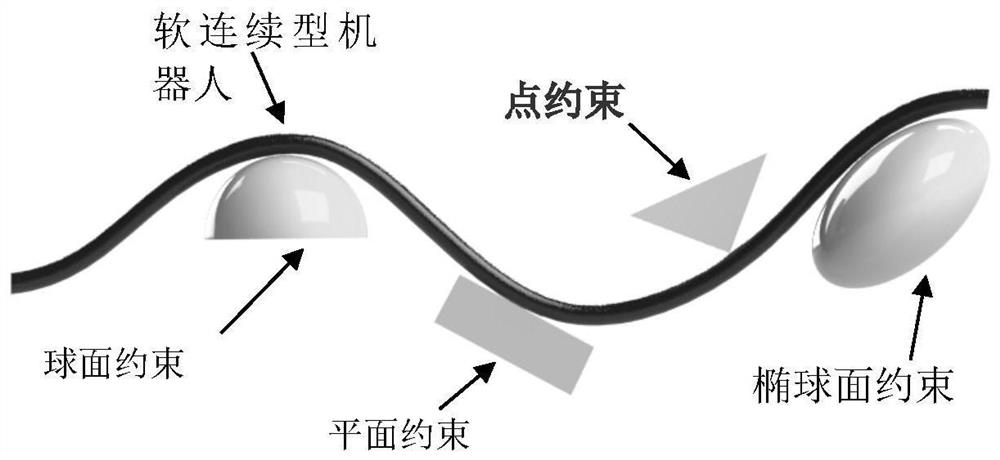
[0067] Such as figure 2 As shown, the robot will be subject to various types of constraints in the space environment, such as point constraints, plane constraints, spherical constraints, ellipsoid constraints, etc.
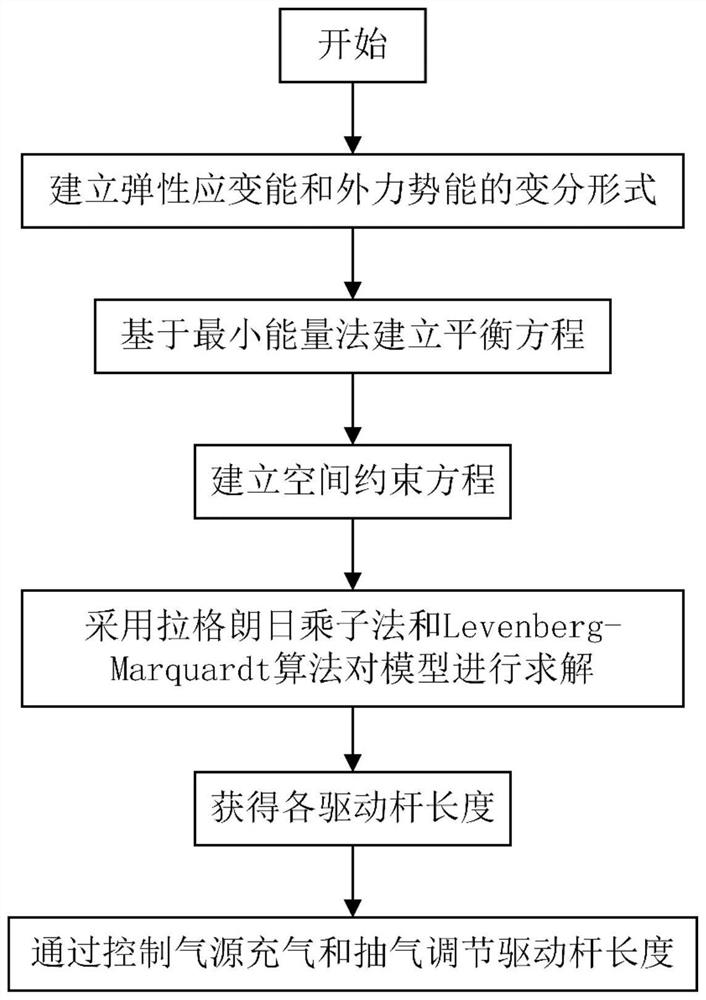
[0068] Such as figure 1 Shown is the flow chart of the method of the present invention, a control method of a soft continuous robot under arbitrary constraints in space, comprising the following steps:
[0069] 1) According to the total energy E of the soft continuous robot t The balance equation to obtain the total energy E of the robot t The external force potential energy E p and elastic strain energy E e ;
[0070] 2) For the external force potential energy E of the soft continuous robot p and elastic strain energy E e Variation, get the external force potential energy E p The variational form of and the elastic stra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More