

Parallel mechanism with three degrees of freedom
A degree of freedom and space technology, applied in the field of robotics, can solve problems such as high manufacturing and control costs, complicated manufacturing and installation processes, and difficult control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The specific implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings.
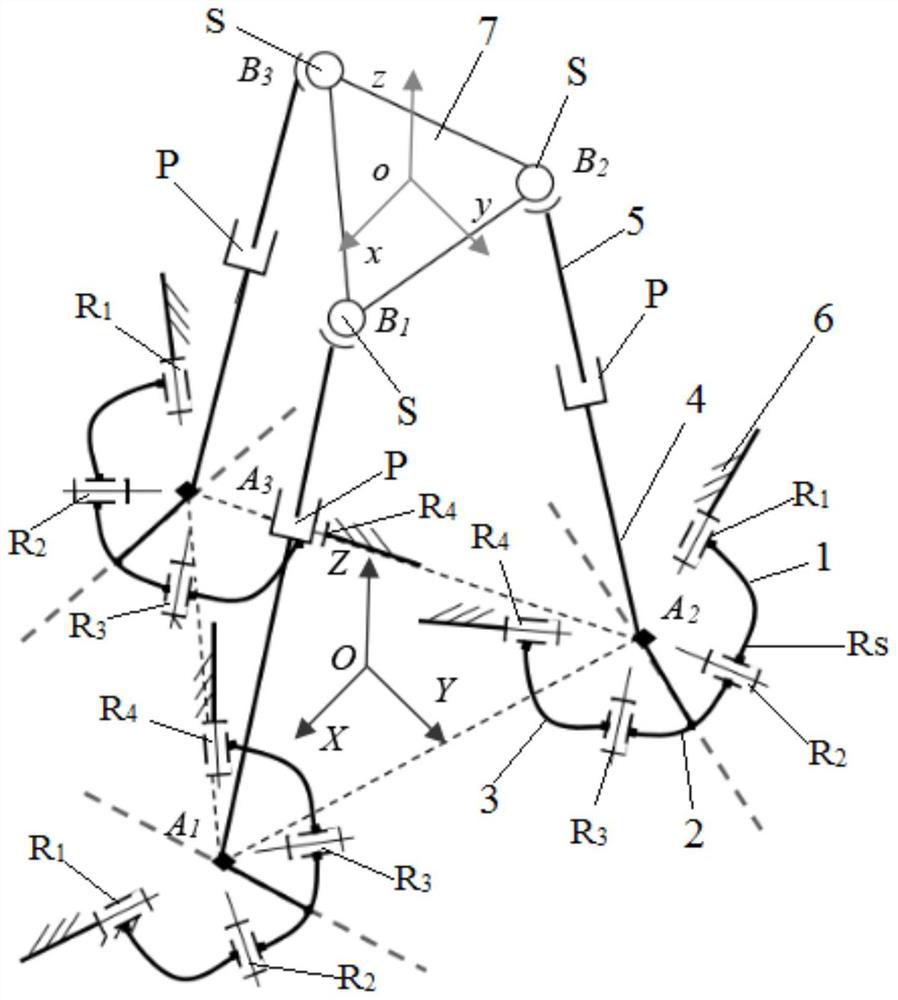
[0016] The present invention has a three-degree-of-freedom space parallel mechanism, such as figure 1 As shown, the moving platform 7 and the fixed platform 6 of the equilateral triangle are included, and the moving platform 7 is connected with the fixed platform 6 through three branch chains to form an equilateral triangular prism. The three branch chains are symmetrically distributed in an equilateral triangle. 7's connections are denoted as B 1 , B 2 , B 3 .
[0017] Each branch chain includes a revolving pair Rs connected to the fixed platform 6, and the revolving pair Rs is sequentially connected with the fourth connecting rod 4, the moving pair P, the fifth connecting rod 5 and the ball pair S, and the ball pair S is connected with the moving platform 7, The axis of the moving pair P passes through the ball pair S.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More