

A Parallel Mechanism with Three Degrees of Freedom
A technology of degrees of freedom and corner stage, applied in the field of robotics, to achieve the effects of high accuracy, high bearing stiffness, and strong dexterity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
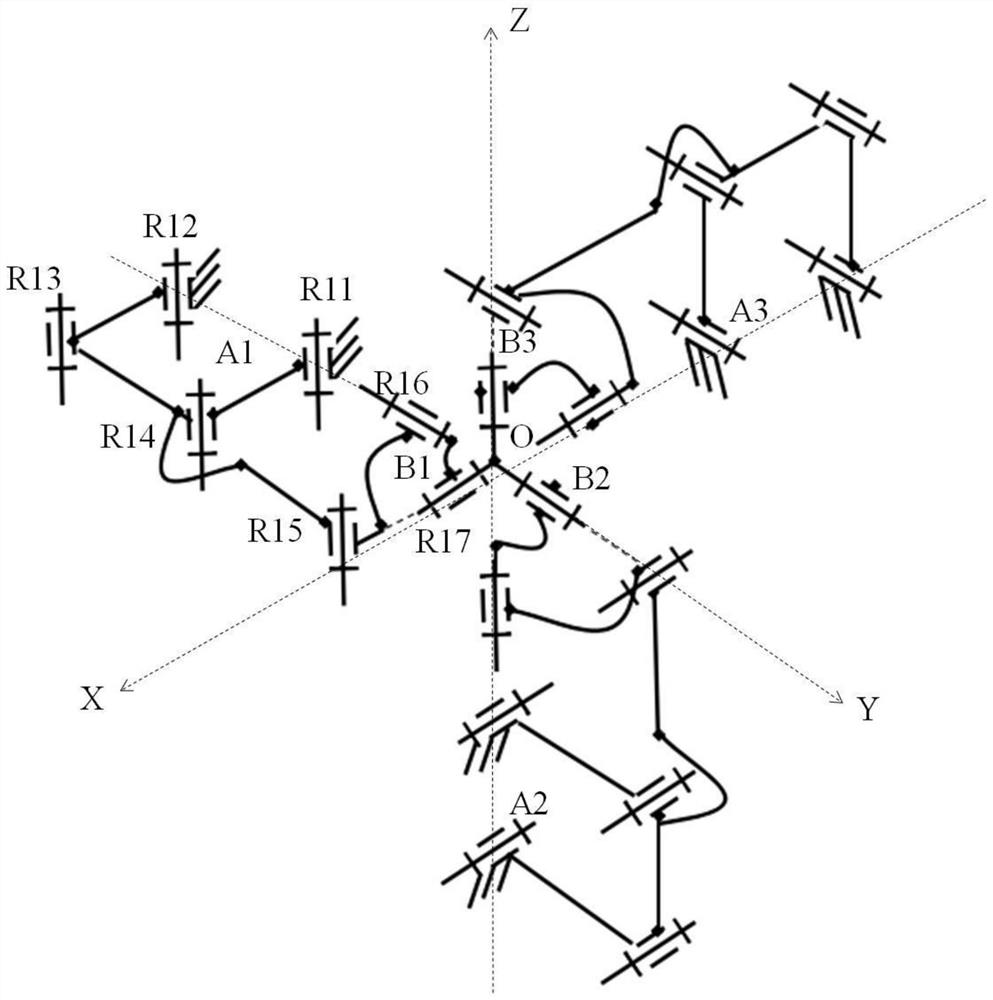
[0015] A kind of angular platform parallel mechanism with three degrees of freedom of the present invention, such as figure 1 As shown, it includes a moving platform and a fixed platform in the shape of a cube corner platform. The moving platform is connected to the fixed platform through three branch chains. The structure and size of the three branch chains are exactly the same. The quadrilateral four-bar mechanism and the flat quadrilateral four-bar mechanism are also connected in turn with a revolving pair R15, a revolving pair R16 and a revolving pair R17, and the revolving pair R17 is connected with the moving platform.
[0016] The moving platform includes B1, B2 and B3. B1, B2 and B3 are respectively located on three axes that are perpendicular to each other and intersect at one point. This point is the apex of the corner platform, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More