

Mechanical hand based on delta parallel mechanism
A manipulator and parallel technology, applied in the field of manipulators, to achieve the effect of expanding applicable occasions and wide application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
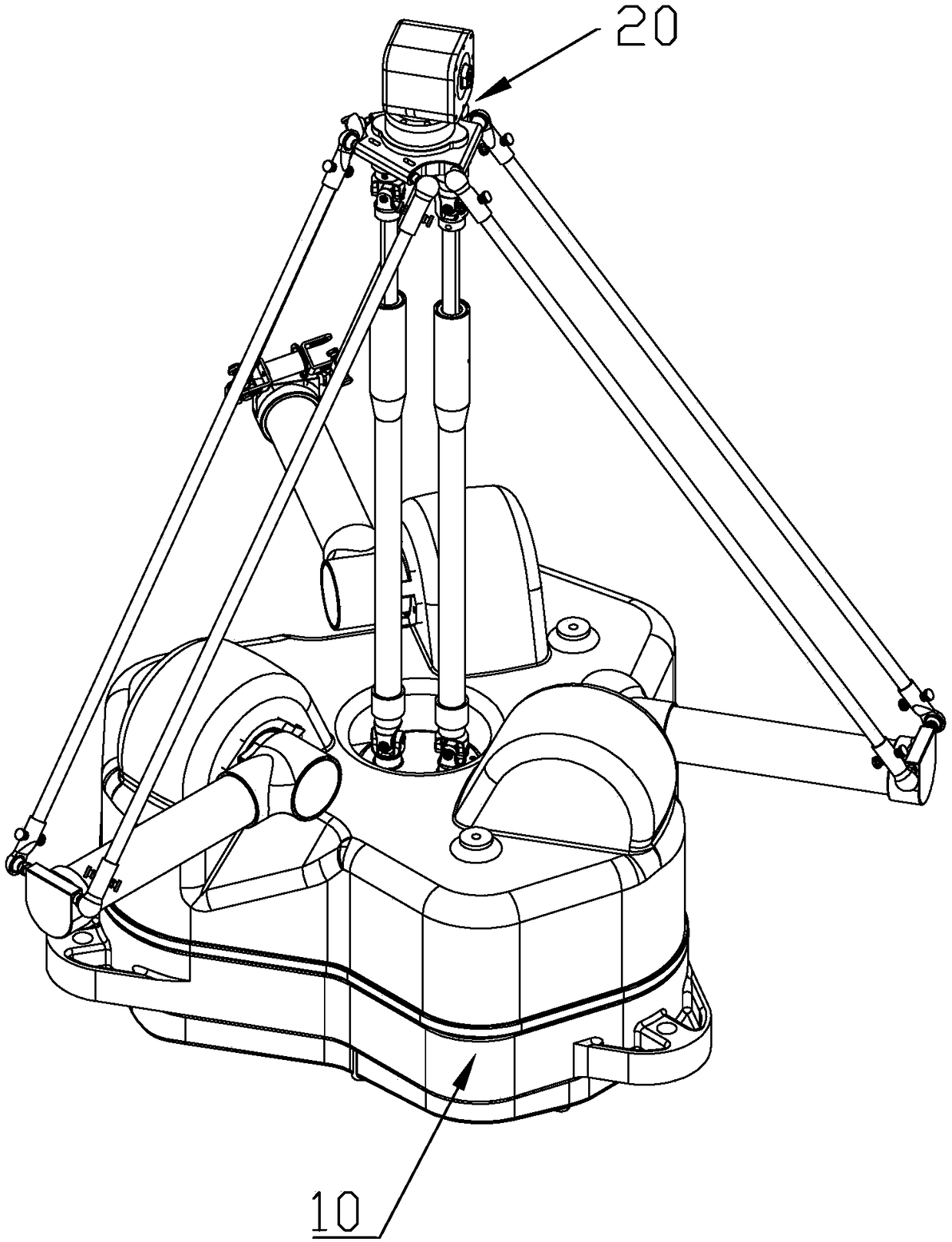
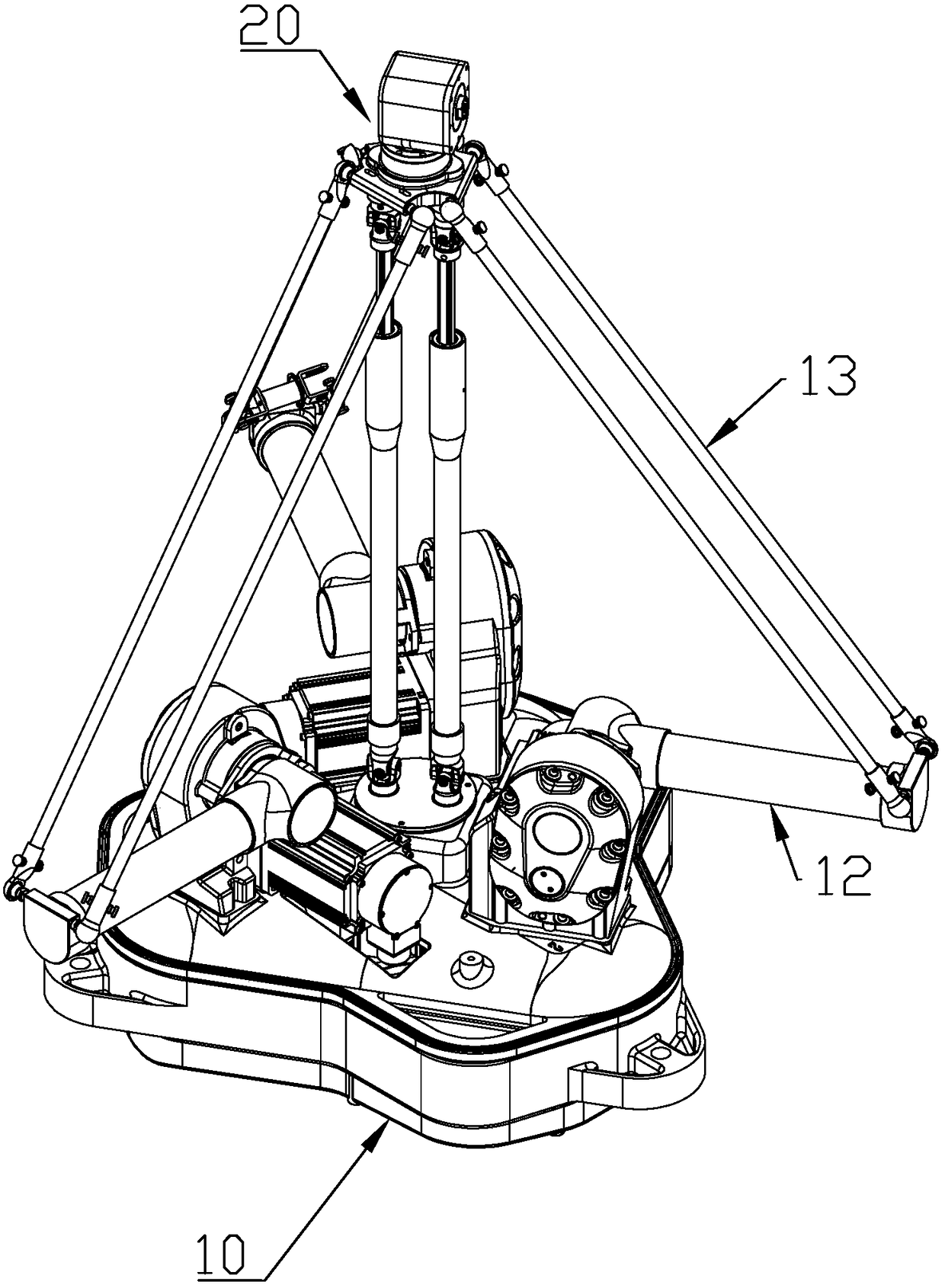
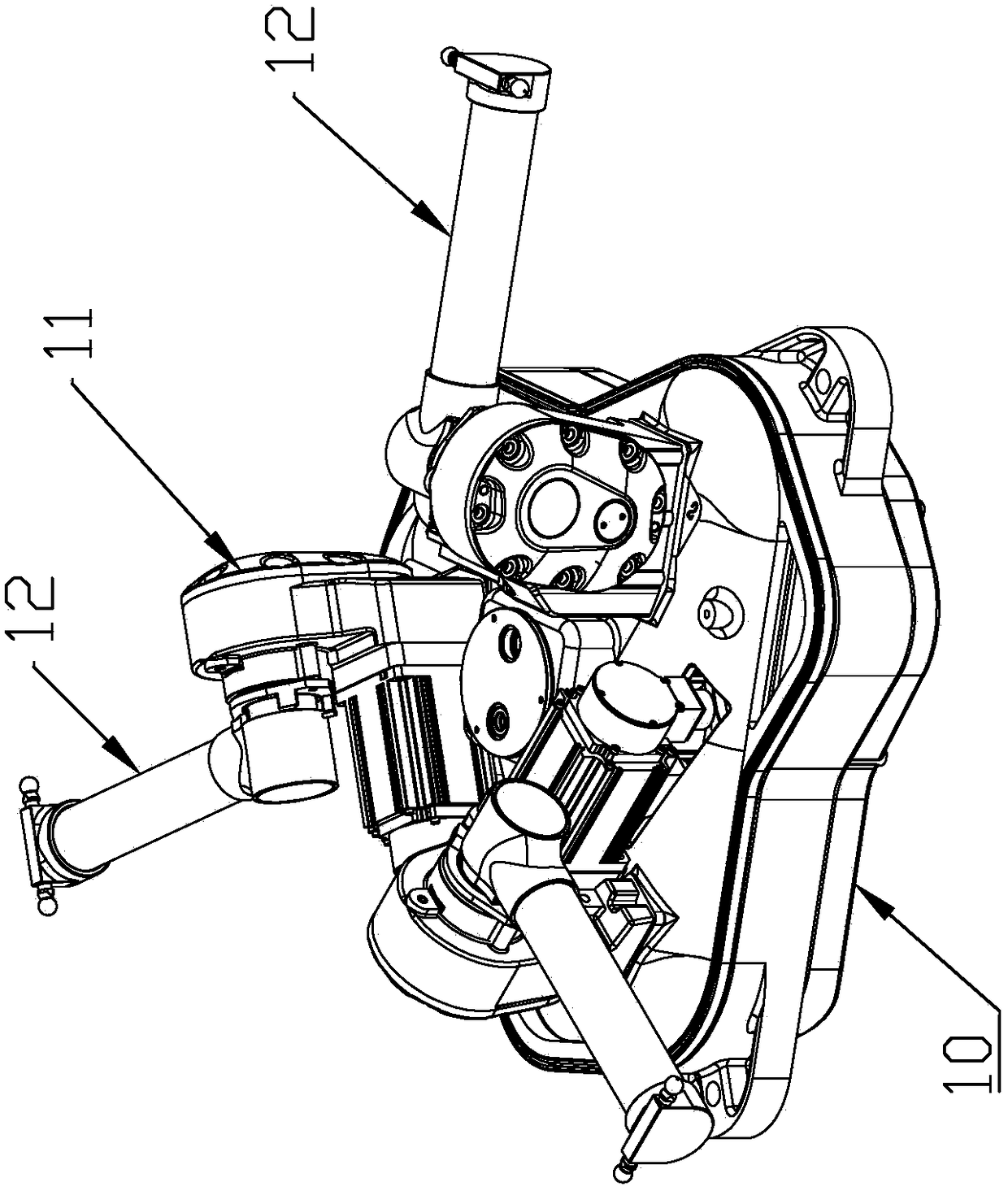
[0025] Combine below Figure 1 to Figure 10 The present invention is further described.
[0026] The manipulator based on the delta parallel mechanism includes a manipulator body 10 , a translation module 20 is arranged above the manipulator body 10 , and a parallel mechanism and a rotation mechanism are arranged between the manipulator body 10 and the translation module 20 . A gripper is arranged on the lower part of the manipulator body 10, and in this embodiment, the gripper is a vacuum suction cup. The top of the gripper is indirectly fixed to the bottom of the rotation mechanism, and the gripper can be rotated independently of the manipulator body 10 through the rotation mechanism. Through the parallel mechanism, the manipulator body 10 can be turned over, and the grippers can be driven to turn over together. The parallel mechanism includes three sets of turning combination arms, the three sets of turning combination arms form a Mitsubishi cone component, and the rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More