

Sweeping robot and its control system and control method
A sweeping robot and control system technology, applied in the field of sweeping robots, can solve problems such as complex structure, insufficient precision of collision position, affecting product integrity and aesthetics, etc., and achieve the effect of efficient obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manners of the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific implementation manners described here are only used to illustrate and explain the embodiments of the present invention, and are not intended to limit the embodiments of the present invention.
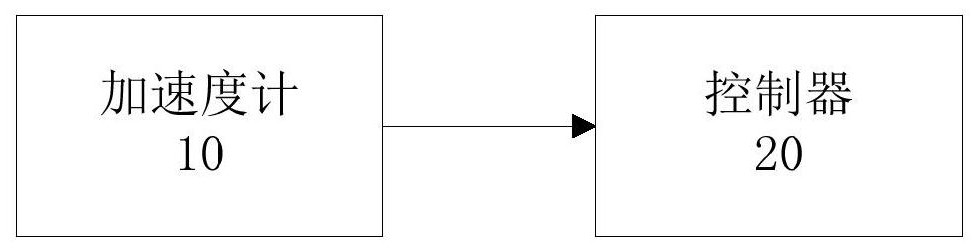
[0031] figure 1 It is a schematic structural diagram of a control system for a sweeping robot provided by an embodiment of the present invention. Such as figure 1As shown, the embodiment of the present invention provides a control system for a sweeping robot, which includes: an accelerometer 10 for detecting the acceleration of the sweeping robot in at least two directions within its motion plane; and a controller 20. It is used to perform the following operations: determine the current movement mode of the sweeping robot; determine the current acceleration of the sweeping robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More