

Two-dimensional laser radar based micro-robot control system and method
A two-dimensional laser radar, micro-robot technology, applied in two-dimensional position/channel control, control/regulation system, non-electric variable control and other directions, can solve the problem that micro-robots cannot automatically avoid obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples and accompanying drawings. As a limitation of the present invention.
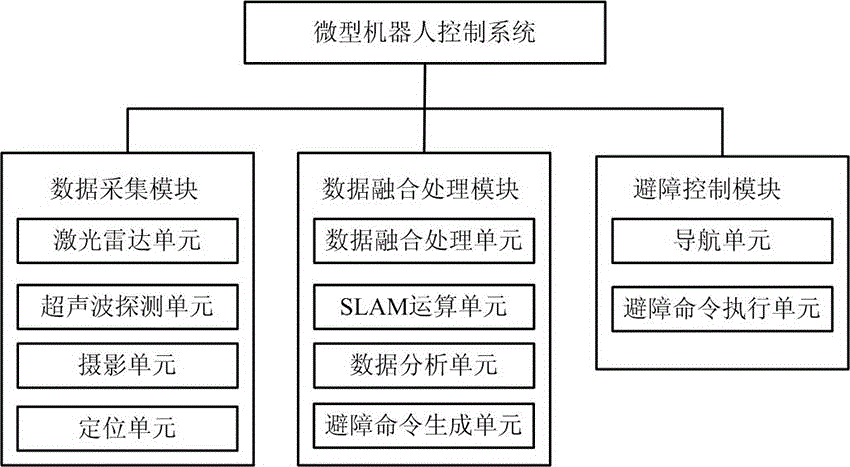
[0039] like figure 1 As shown, a micro-robot control system based on two-dimensional laser radar includes a data acquisition module, a data fusion processing module and a barrier control module.
[0040] The data acquisition module includes a laser radar unit, an ultrasonic detection unit, a camera unit and a positioning unit; the laser radar unit is used to collect the first distance information between the micro robot and the obstacle in real time; the ultrasonic detection unit is used to collect the distance between the micro robot and the obstacle in real time. The second distance information; the camera unit is used to collect the scene images around the micro-robot in real time; the positioning unit i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More