

A Fault Diagnosis Method of UAV Formation System Based on Sliding Mode Observer
A technology of sliding mode observer and fault diagnosis, which is applied in general control systems, control/regulation systems, instruments, etc., to achieve the effects of fast fault estimation, high accuracy, and strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
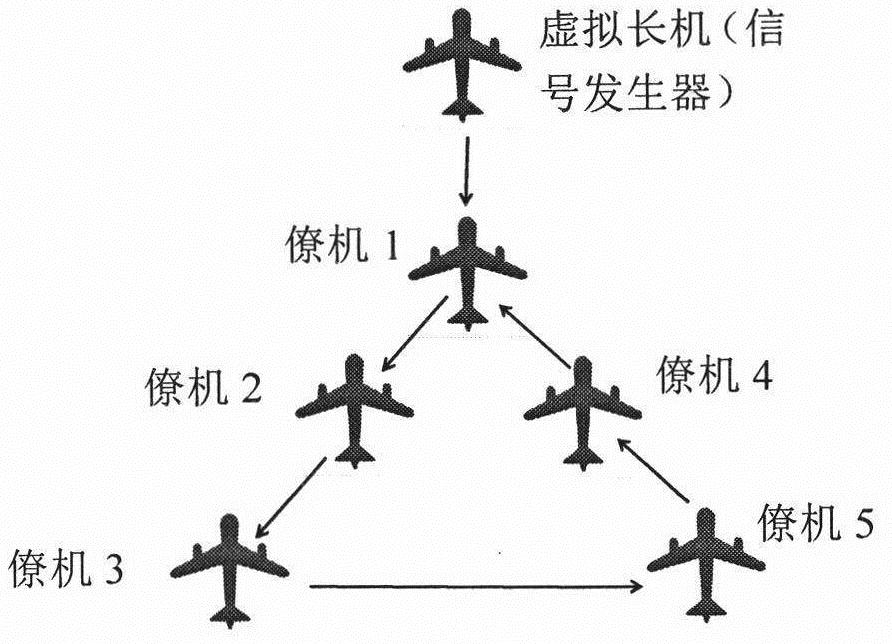
[0105] 1. If figure 1 As shown, consider a UAV formation system composed of 5 wingmen and 1 leader under the directed graph network topology, and the state space model of any UAV in the case of actuator failure is modeled as follows Show:
[0106]
[0107] where, i=1, 2, ..., 5, represent the state variable, control input and system output of the i-th UAV, respectively. g(x i ) is the nonlinear part of the system, which satisfies the Lipschitz condition. Represents an actuator failure, and the failure is bounded but the upper bound is unknown, ie ||f i (t)||≤α, but α is unknown. Indicates the external disturbance, the disturbance is bounded and known, ie ||φ i (t)||≤β, β is known. The matrices A, B, E, D, and C are all constant real matrices of appropriate dimension, and (A, C) are observable, and the matrices C and E are full rank.
[0108] 2. Designing an adaptive sliding mode observer based on the relative output error described by the directed graph network t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More