

Path planning method under mobile robot multi-constraint condition
A mobile robot and path planning technology, applied in the field of mobile robots, can solve problems such as rough paths and difficult paths to track, and achieve the effect of smooth paths, easy tracking, and satisfying curvature constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
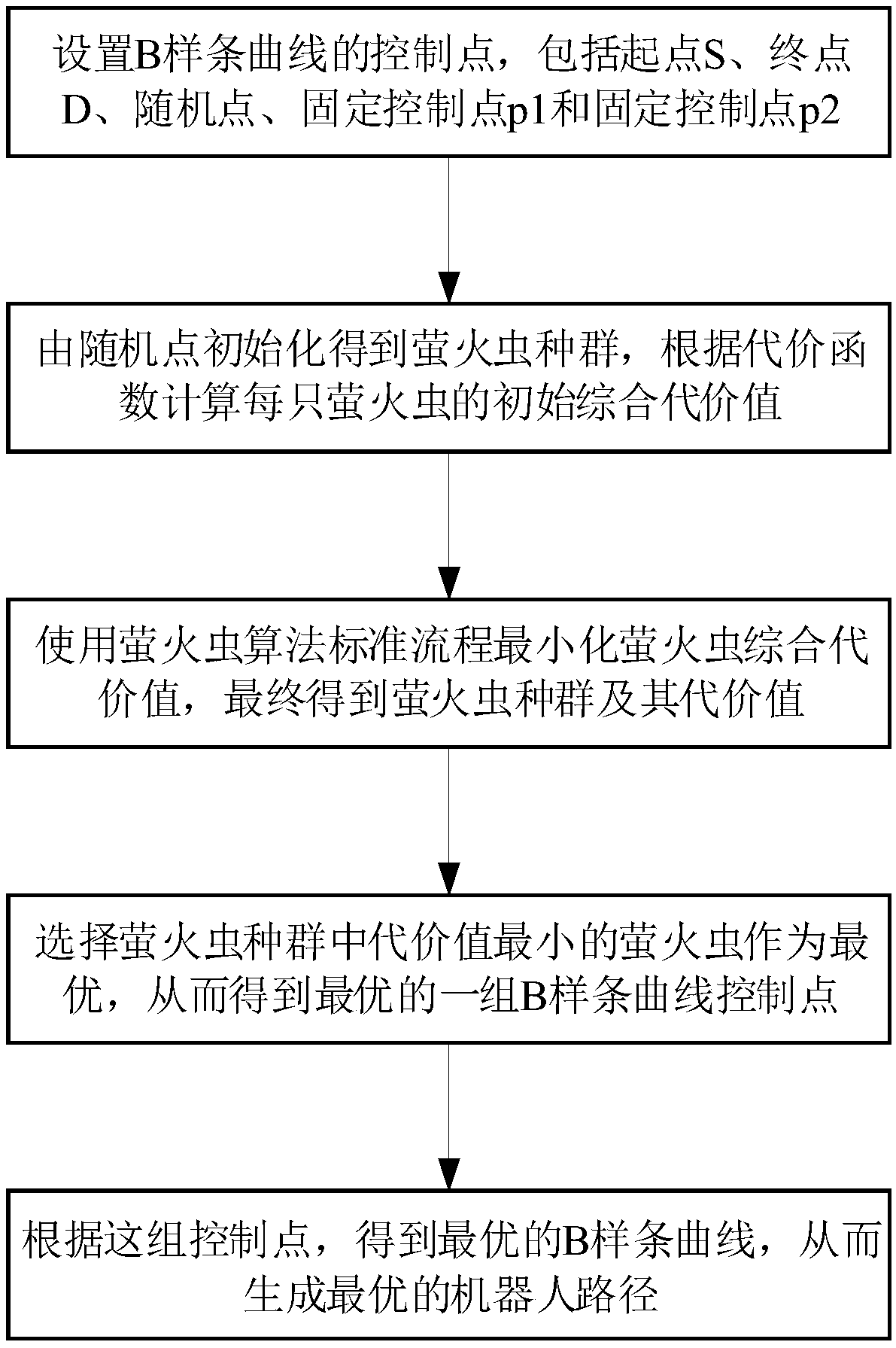
[0066] A preferred embodiment of the present invention provides a path planning method for mobile robots under multiple constraints. The present invention is mainly aimed at robots moving on a two-dimensional plane, such as figure 1 shown, including the following steps:
[0067] Step 1: Set the control points of the B-spline curve, combine the curve order K and other parameters to obtain several B-spline curves composed of discrete points, and then use these B-spline curves to represent several initial robot paths. Control points include starting point S, end point D, random point, fixed control point p 1 and a fixed control point p 2 , the fixed control point is used to control the start and end directions of the path;
[0068] Step 1.1: Considering that the path generally does not appear to be twisted or crossed back and forth, the order of the control points is generally set from the start point to the end point, and it is also convenient for the initial position of the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More