

UAV track planning method based on particle swarm and prm algorithm
A track planning and unmanned aerial vehicle technology, which is applied in three-dimensional position/course control, instruments, control/regulation systems, etc., can solve the problems of increased calculation and path failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
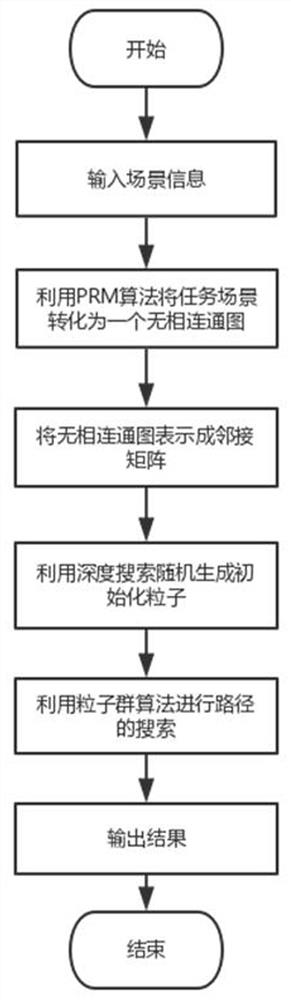
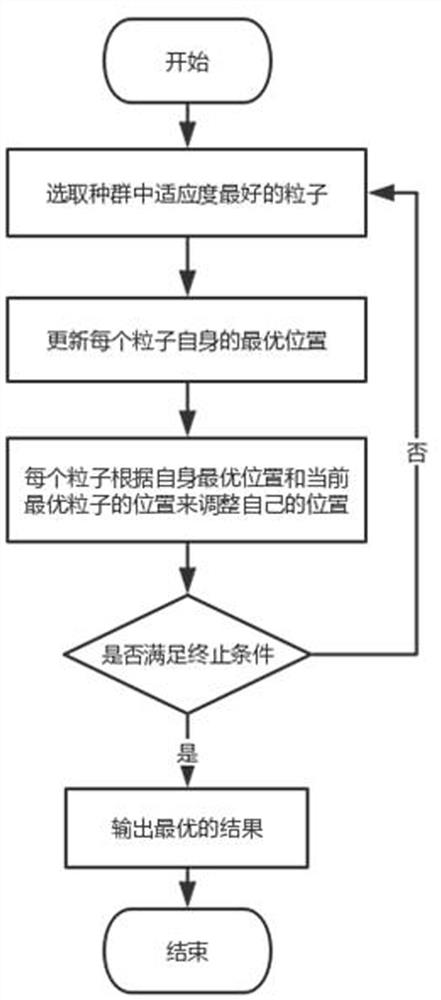
[0028] The invention belongs to the field of intelligent optimization algorithms, and specifically relates to an unmanned aerial vehicle track planning algorithm based on particle swarm and PRM algorithms; The space planning problem is transformed into a topological space planning problem, thereby greatly reducing the complexity of the path planning problem; then in the topological space, the present invention uses the particle swarm algorithm to solve the problem, thereby obtaining a reasonable route planning scheme. Specific steps are as follows:
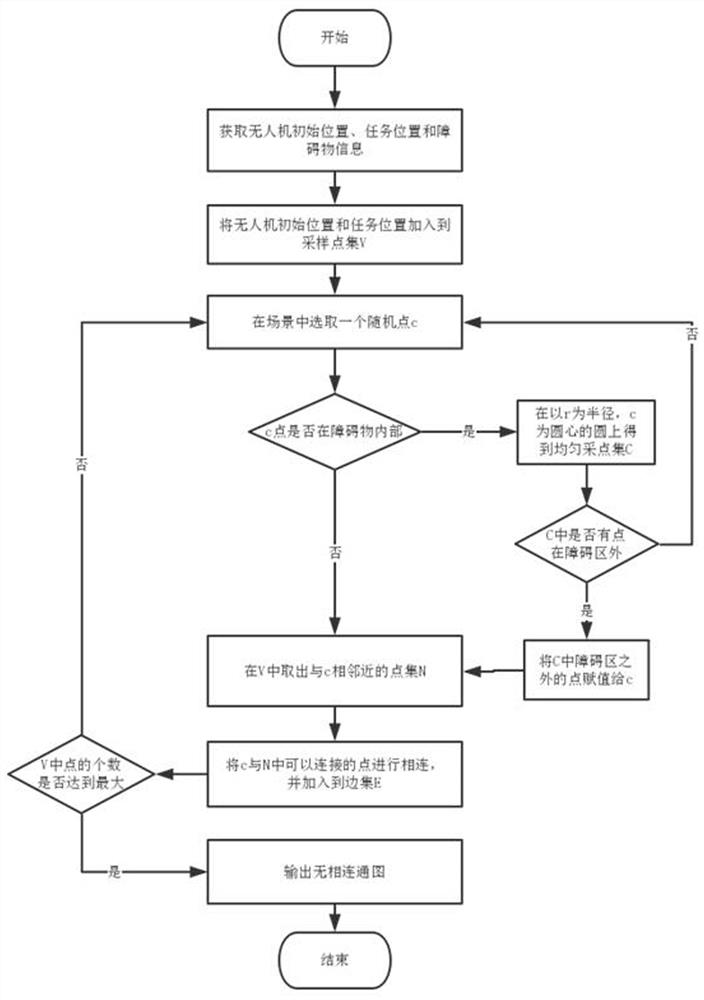
[0029] Step 1): Obtain the input starting position of the drone (x start ,y start ), task position (x end ,y end ) and the number of obstacles m, T={T 1 ,T 2 ,...,T m}, each obstacle T i specific shape and location information. Obstacles in the task scene will be abstracted into circles and polygons. For circular obstacles, the center and radius of the obstacle need to be input as [(x, y), r]. Enter the coordinates of ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More