

Safe driving method of road roller and road roller
A road roller and safety technology, applied in the field of road rollers, can solve problems such as low safety, large safety hazards, and many road rollers, and achieve the effect of improving safety and reducing detection blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
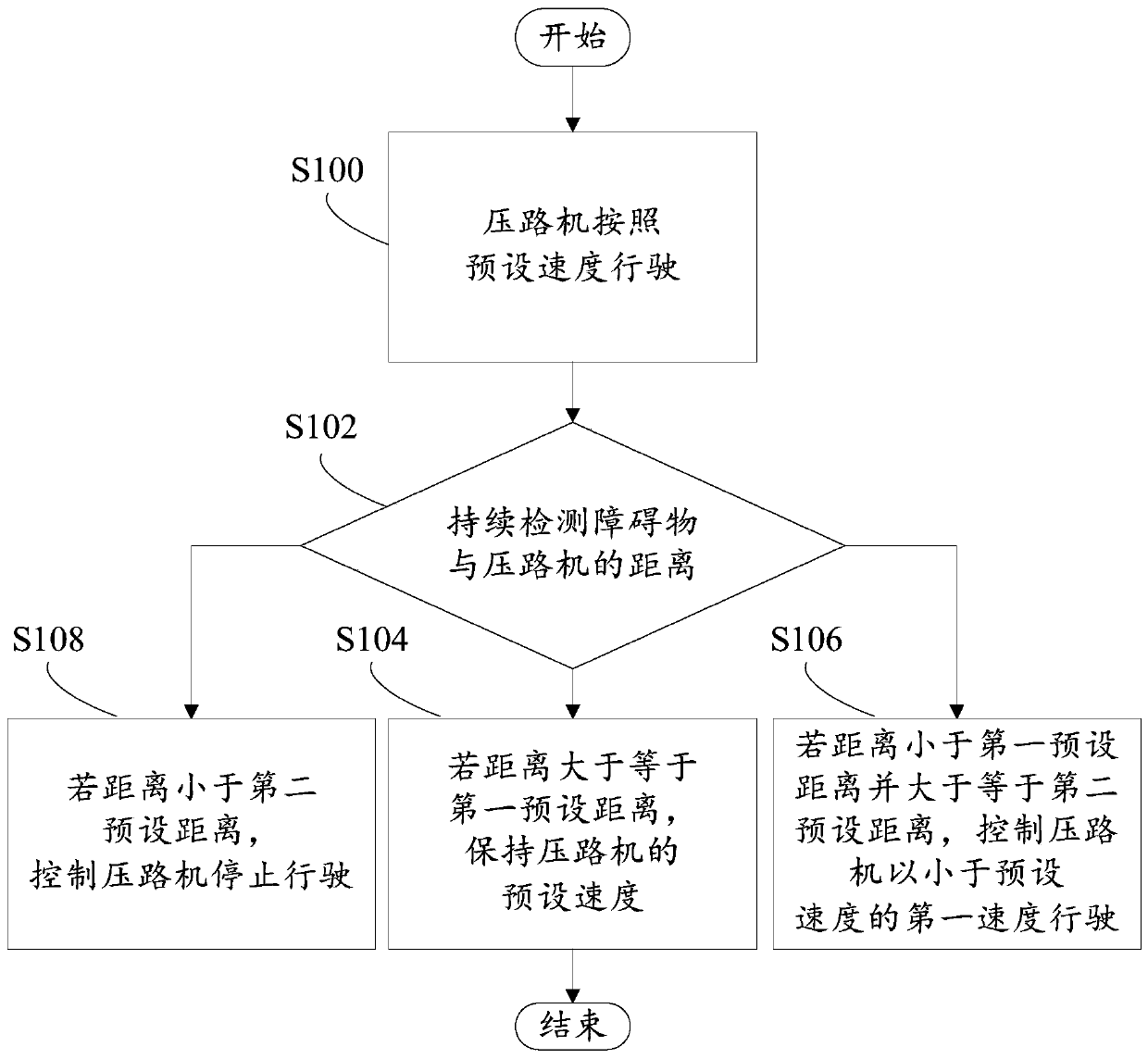
[0054] Such as figure 1 As shown, the safe driving method of road roller 14 according to an embodiment of the present invention includes:
[0055] Step S100: the road roller runs at a preset speed;
[0056] Step S102: Continuously detect the distance between the obstacle and the road roller;
[0057] By continuously detecting the distance between the obstacle and the road roller 14, the position of the obstacle can be grasped in real time, so that when the road roller 14 approaches the obstacle, timely measures can be taken to avoid collision.
[0058] Preferably, only the distance between the obstacle in the traveling direction of the road roller and the road roller is detected, so as to avoid complicated structure caused by too many sensors.
[0059] It can be understood that the traveling direction of the road roller is in the length direction of the road roller.
[0060] Step S104: if the distance is greater than or equal to the first preset distance, maintain the prese...
Embodiment 2
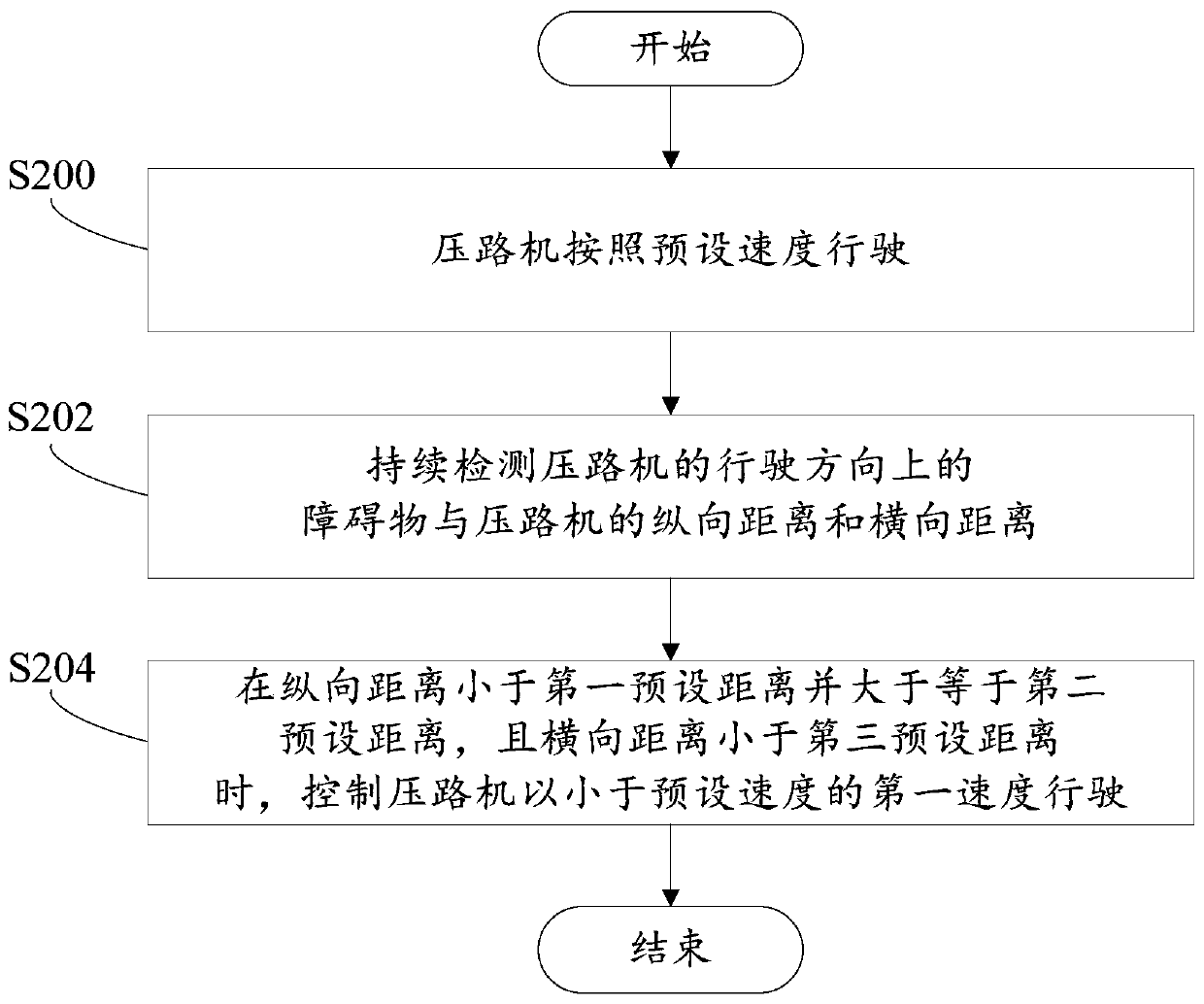
[0067] Such as image 3 As shown, the safe driving method of road roller 14 according to an embodiment of the present invention includes:
[0068] Step S200: the road roller runs at a preset speed;
[0069] Step S202: Continuously detect the longitudinal distance and lateral distance between the obstacle in the traveling direction of the road roller and the road roller;
[0070] It can be understood that an obstacle will block the road roller 14 when driving directly ahead, and may block the normal running of the road roller 14 when it is in front of the side, especially when the road roller 14 is turning. The vertical distance in the direction also needs to detect the horizontal distance to accurately judge whether the road roller 14 may hit an obstacle, so that the road roller 14 can avoid it in time.
[0071] It should be pointed out that, as mentioned above, the driving direction of the road roller is in the length direction of the road roller, therefore, the longitudina...
Embodiment 3
[0076] Such as Figure 4 As shown, the safe driving method of road roller 14 according to an embodiment of the present invention includes:
[0077] Step S300: the road roller travels at a preset speed;
[0078] Step S302: Continuously detect the longitudinal distance and lateral distance between the obstacle in the traveling direction of the road roller and the road roller;
[0079] Step S304: the longitudinal distance is less than the first preset distance and greater than or equal to the second preset distance, and the lateral distance is less than the third preset distance, and the road roller is controlled to travel at a first speed less than the preset speed;
[0080] Step S306: Reacquire the distance between the obstacle and the road roller every preset time period;
[0081] In the construction site, the obstacle may be an object, such as piled up materials, or stones on the road surface; it may also be a pedestrian, an animal or a vehicle, and if it is a pedestrian or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More