

A Hybrid Camera Calibration Method in Urban Environment
A hybrid camera and urban environment technology, applied in image analysis, image enhancement, instrumentation, etc., can solve problems such as lack of building tracking methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] With reference to accompanying drawing, further illustrate the present invention:
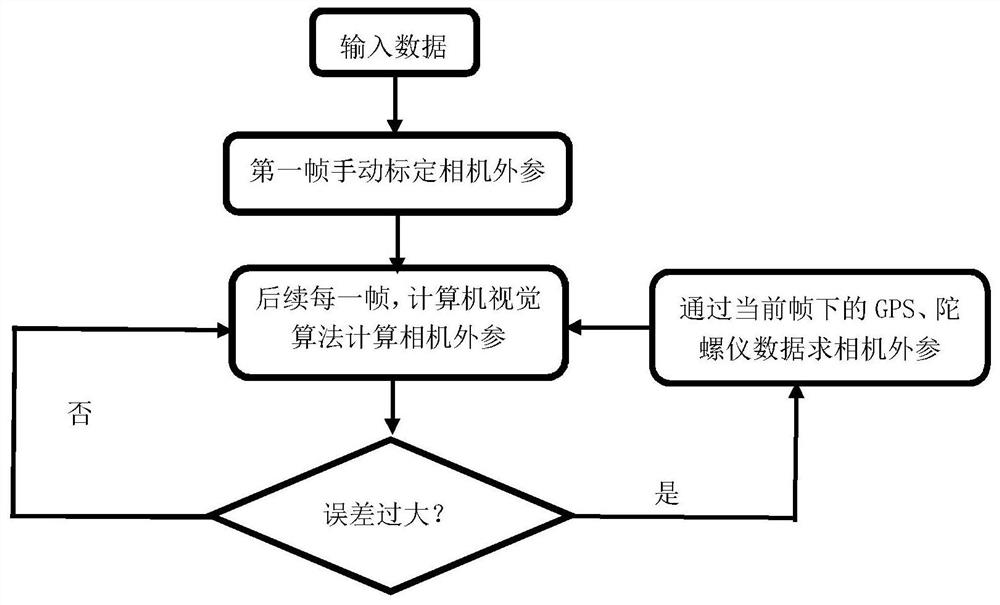
[0021] A hybrid camera calibration method based on GIS technology, including the following steps:
[0022] Step 1. Manually calibrate the first frame.
[0023] Step 2. For each subsequent frame: track through the computer vision algorithm, if the tracking fails, go to step 3.
[0024] Step 3. Obtain the GPS and gyroscope data in the current frame, calculate the extrinsic parameter matrix and track the target, and then go to step 2.
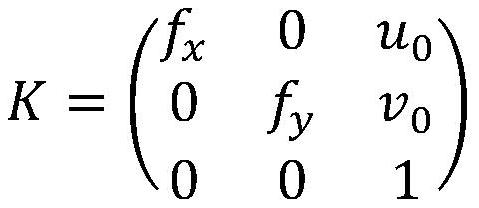
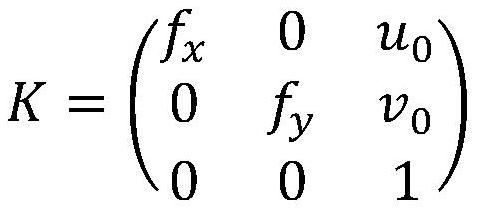
[0025] In step 1, the internal parameter matrix K of the camera needs to be provided, and its form is as follows:
[0026]
[0027] where f x and f y are the focal lengths of the camera in the horizontal and vertical directions, respectively, u 0 and v 0 are the principal point offsets in the horizontal and vertical directions. Then obtain the 2D point positions of the specified four 3D points on the image through mouse interaction, and then calcul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More