

A Workpiece Pose Estimation Method Based on Component Model Expression
A technology for component model and pose estimation, applied in the field of computer vision, can solve the problems of inability to handle weakly textured workpieces, low adaptability, etc., and achieve the effect of fast, high-performance, and high-efficiency performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The present invention can be realized on Windows and Linux platforms, and the programming language can also be selected, and can be realized by using Python.
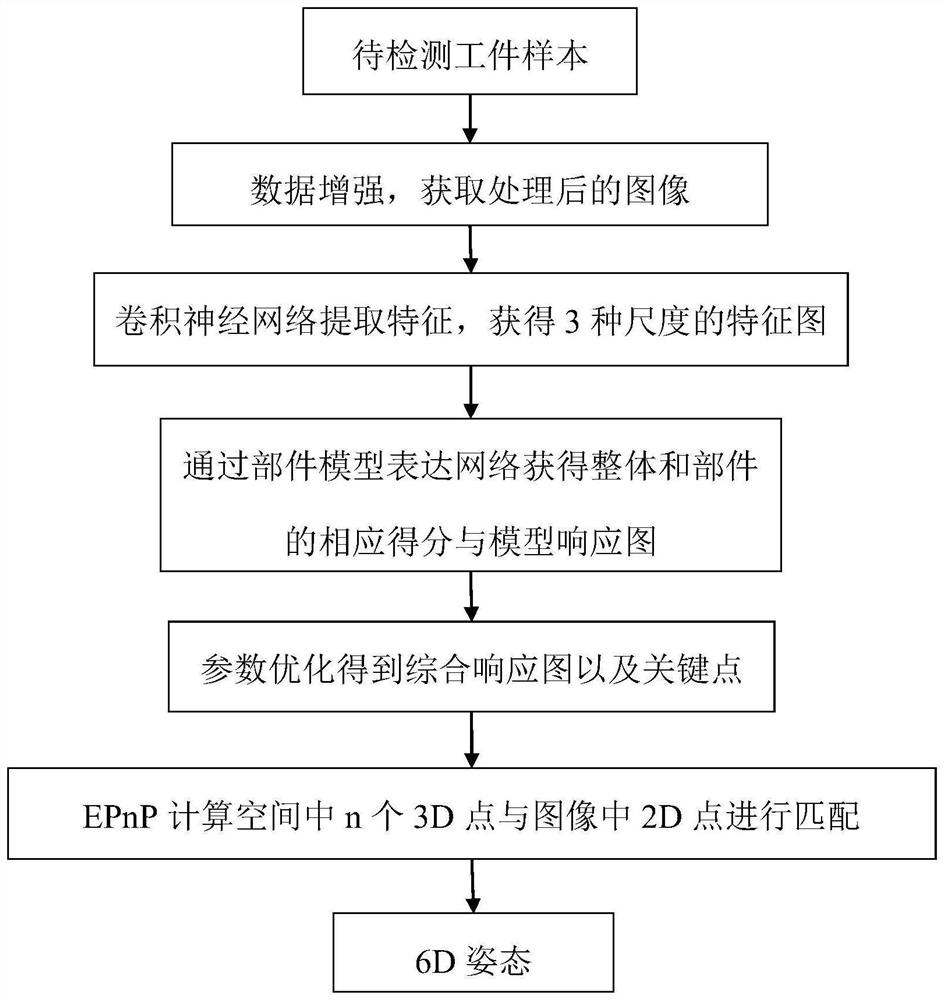
[0044] Such as figure 1 Shown, the present invention a kind of workpiece pose estimation method based on component model expression, comprises the following steps:
[0045] Step 1: Perform data enhancement on the data to be detected, perform random cropping, scaling, and rotation operations on the image, and then reset the image size to keep the same size and resolution as the original image;
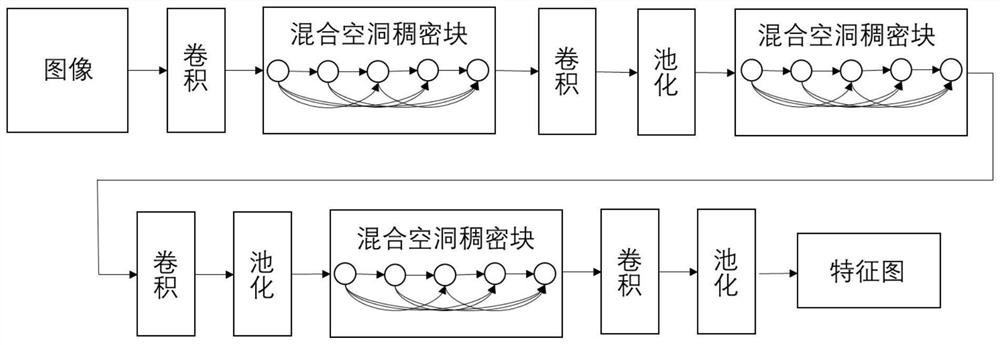
[0046] Step 2: Extract the features of the image through the convolutional neural network to obtain feature maps of 3 scales;
[0047] Step 3: Express each feature map through the component model to express the network structure, and obtain the corresponding scores and model response map...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More