

Three-dimensional sight line estimation method and device oriented to resource-constrained scene
A line-of-sight estimation and resource-oriented technology, applied in the field of artificial intelligence, can solve problems such as slow speed, many processes, unfavorable line-of-sight estimation, etc., and achieve the effect of increasing speed, simplifying the process, and efficient line-of-sight estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
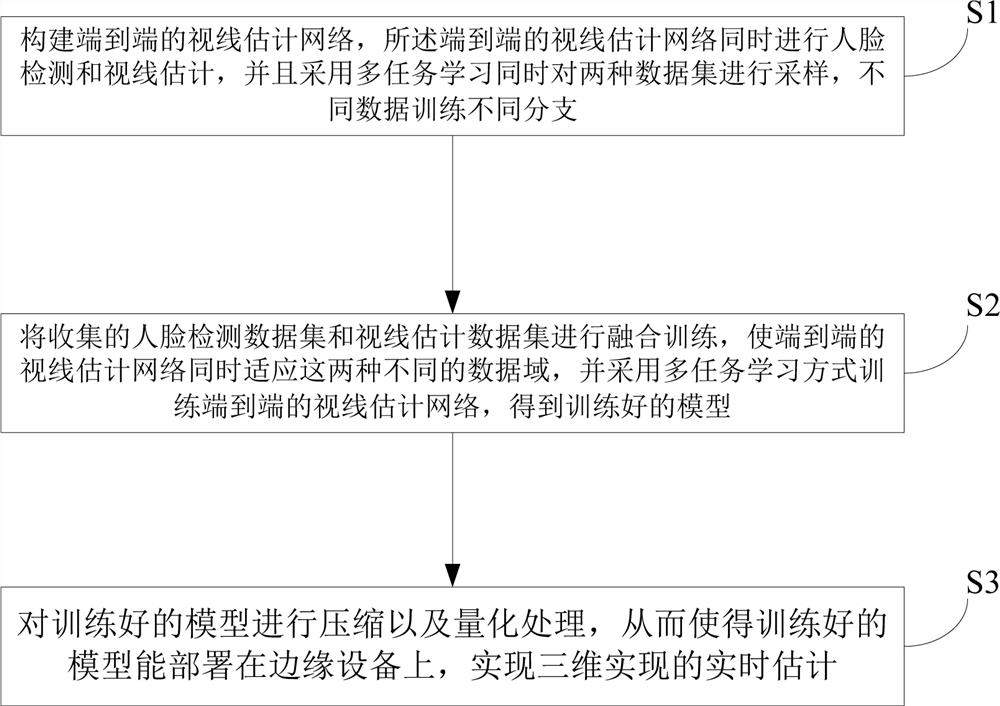
[0068] like figure 1 As shown, this embodiment is a method for estimating a 3D line of sight with limited resource scenarios, and the method includes the following steps:
[0069] S1. Construct an end-to-end line of sight estimation network. The end-to-end line of sight estimation network performs face detection and line of sight estimation at the same time, and uses multi-task learning to sample two data sets at the same time, and trains different branches with different data;
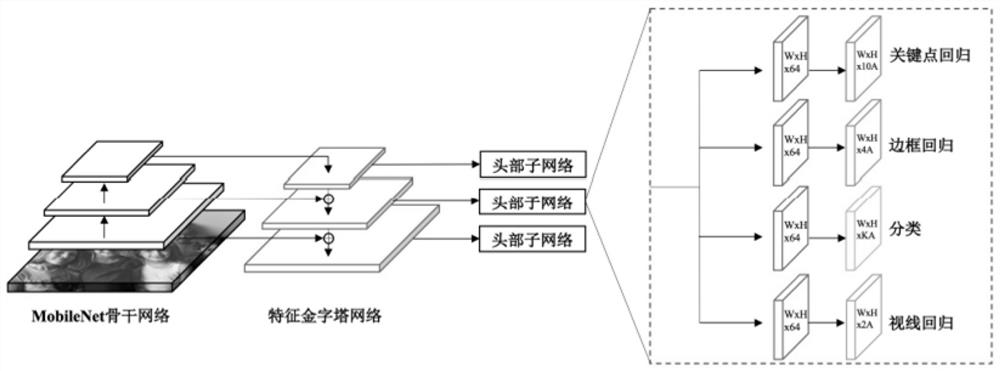
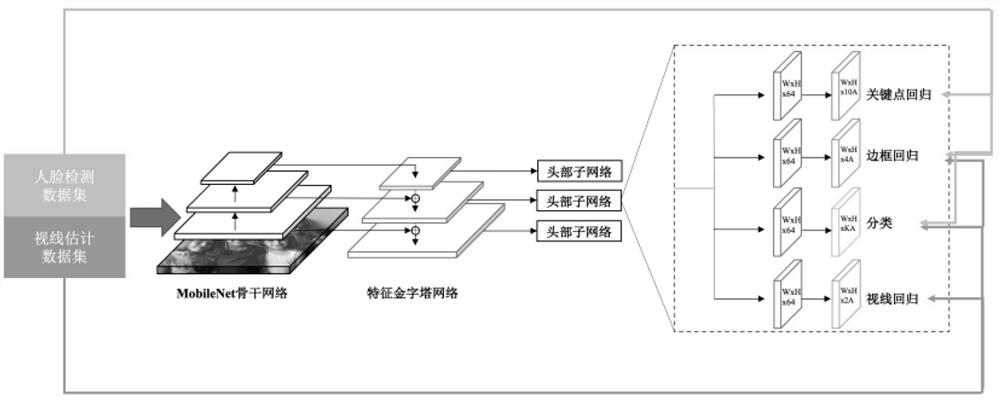
[0070] like figure 2 As shown, the end-to-end line-of-sight estimation network includes a backbone network, a classification sub-network, a border regression sub-network and a line-of-sight estimation sub-network; the backbone network is used to convolute and calculate feature maps on the entire input image, and the classification sub-network The network is used to perform convolutional object classification on the output of the backbone network; the frame regression sub-network is used to perform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More