A three-translation-one-rotation parallel robot with zero coupling degree and positive analytical position solution
An analytical, zero-coupling technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems that do not have analytic position positive solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0007] The technology of the present invention will be further described below by means of accompanying drawings and examples.
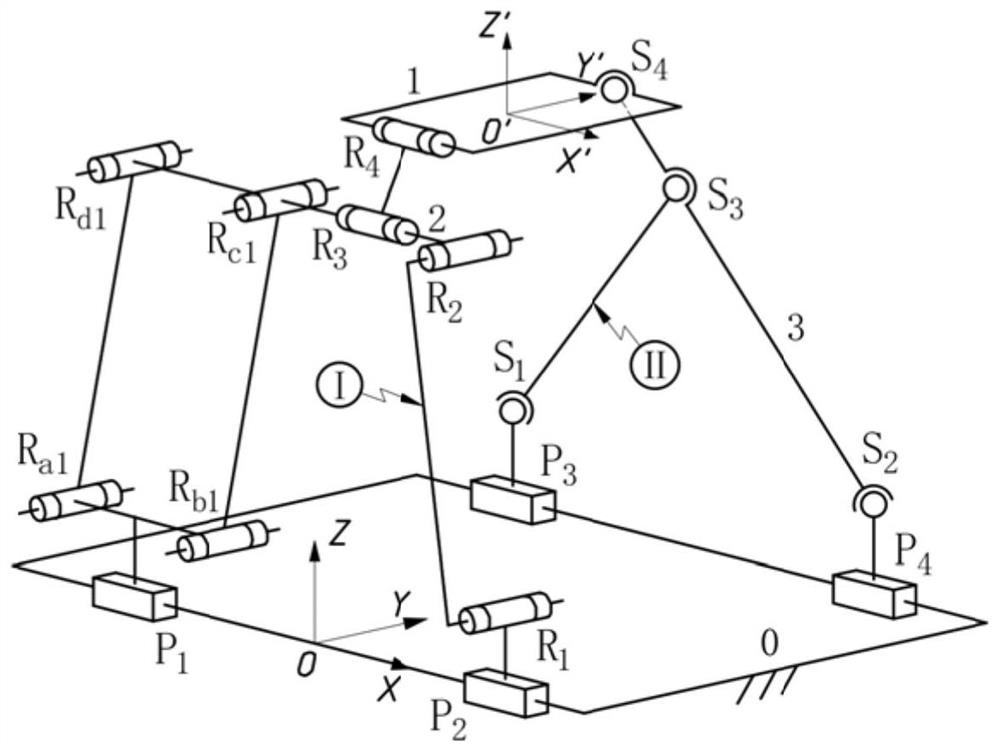
[0008] attached figure 1 The shown parallel robot device is one of the embodiments of the present invention, and its technical solution is as follows: a three-translation-rotation parallel robot with zero coupling degree and analytical position positive solution, including two hybrid branch chains, a moving platform 1 And the static platform 0, the hybrid branch-I contains the moving pair-P 1 and the parallelogram R with 4 revolving pairs a1 -R b1 -R c1 -R d1 The same motion plane branch formed in series, the translation output rod (2) of this branch is connected with the second P of the moving pair 2 And two parallel axis revolving pair-R 1 , rotating pair 2 R 2 The formed branches are connected in series to form a planar mechanism, and the translation output rod 2 of the planar mechanism is connected in series with two rotating pairs of para...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



