

Self-adaptive event triggering-based wheeled robot constant-speed linear formation control method
A wheeled robot, event-triggered technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problems of formation paralysis, high communication cost, and unsuitable application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
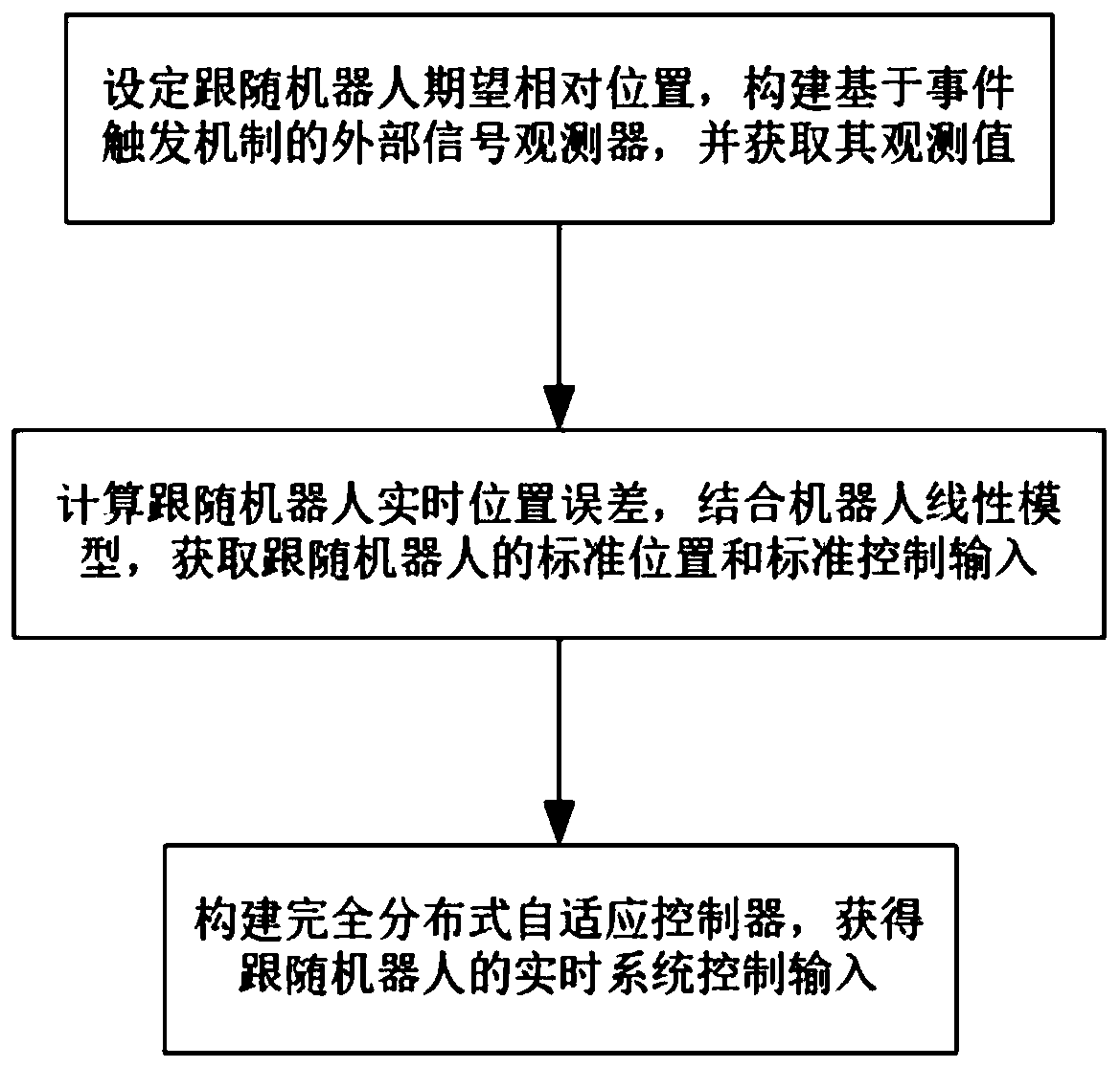
[0067] Such as figure 1 As shown, this embodiment is a method for controlling wheeled robots in a uniform linear formation based on adaptive event triggering. The wheeled robots include a leader robot and multiple follower robots. The method includes the following steps:
[0068] S1: Set the expected relative position of the follower robot and the leader robot in a uniform line formation, build an external signal observer based on the event trigger mechanism, and obtain the observation value of each follower robot relative to the leader robot;
[0069] S2: Calculate the position error between the follower robot and the leader robot, and combine the robot linearization model to obtain the standard position and standard control input of the follower robot;
[0070] S3: Based on the standard position and standard control input of the following robot, construct a fully distributed adaptive controller to obtain the real-time system control input of the following robot.
[0071] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More