

Communication control method in multi-UAV cooperative control based on event trigger
A multi-UAV and event-triggered technology, which is applied in control/regulation systems, non-electric variable control, three-dimensional position/channel control, etc., can solve problems such as unrelieved communication pressure, reduced frequency of control updates, waste of resources, etc. , to achieve the effect of maximizing actual engineering value, reducing waste, and intuitive working process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
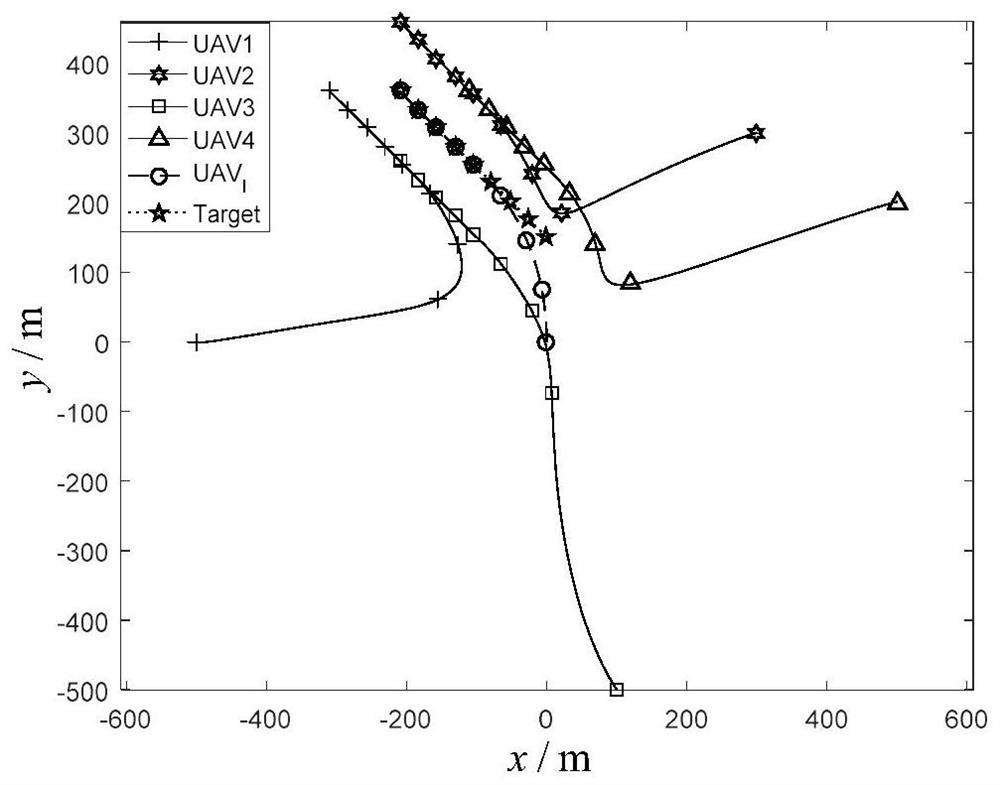
[0117] UAV formation target tracking when ω=0, the simulation diagram of multi-aircraft formation target tracking when ω=0 is as follows Figure 3 to Figure 7 shown.
[0118] image 3 Trajectory diagram of tracking target for UAV formation, UAV can be observed in the picture l It can track the target, and at the same time, the UAV can form a predetermined formation and realize the tracking of the target, which shows the feasibility of using the communication control method in the event-triggered-based multi-UAV cooperative control proposed by the present invention; Figure 4 and Figure 5 They are the error curves of formation position and speed, which are about 10s, and the error curves tend to 0, indicating that at about 10s, each UAV is in the UAV. l Form preset formations around and follow the UAV l continue to track the target; Image 6 The event trigger distribution map during the formation target tracking process during 0-4s and 10-14s is shown. Obviously, the infl...
Embodiment 2
[0123] When ω≠0, UAV formation target tracking, select the value of ω as ω 1 =0.3rad / s, ω 2 =0.8rad / s, the simulation results are as follows Figure 8 to Figure 11 and shown in Table 2.
[0124] Depend on Figure 8 It can be observed that when ω≠0, the communication control method in the event-triggered multi-UAV cooperative control proposed in the present invention is also feasible, and it can be found that when the UAV forms the desired formation, it starts to circle. , and keep circling around the target after tracking the target; Figure 9 and Figure 10 The error curve between the position and speed of the middle formation tends to 0 around 10s. At 13.5s, due to the speed adjustment after the formation has tracked the target, the curve oscillates slightly, but then tends to 0 again soon; Figure 11 The trigger distribution diagram of , we can observe the effect of the event trigger mechanism on reducing the number of communications. Table 2 further confirms that the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More