

Unmanned surface ship dynamic collision avoidance method based on track re-planning
An unmanned boat, re-planning technology, applied in navigation, surveying and navigation, navigation calculation tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
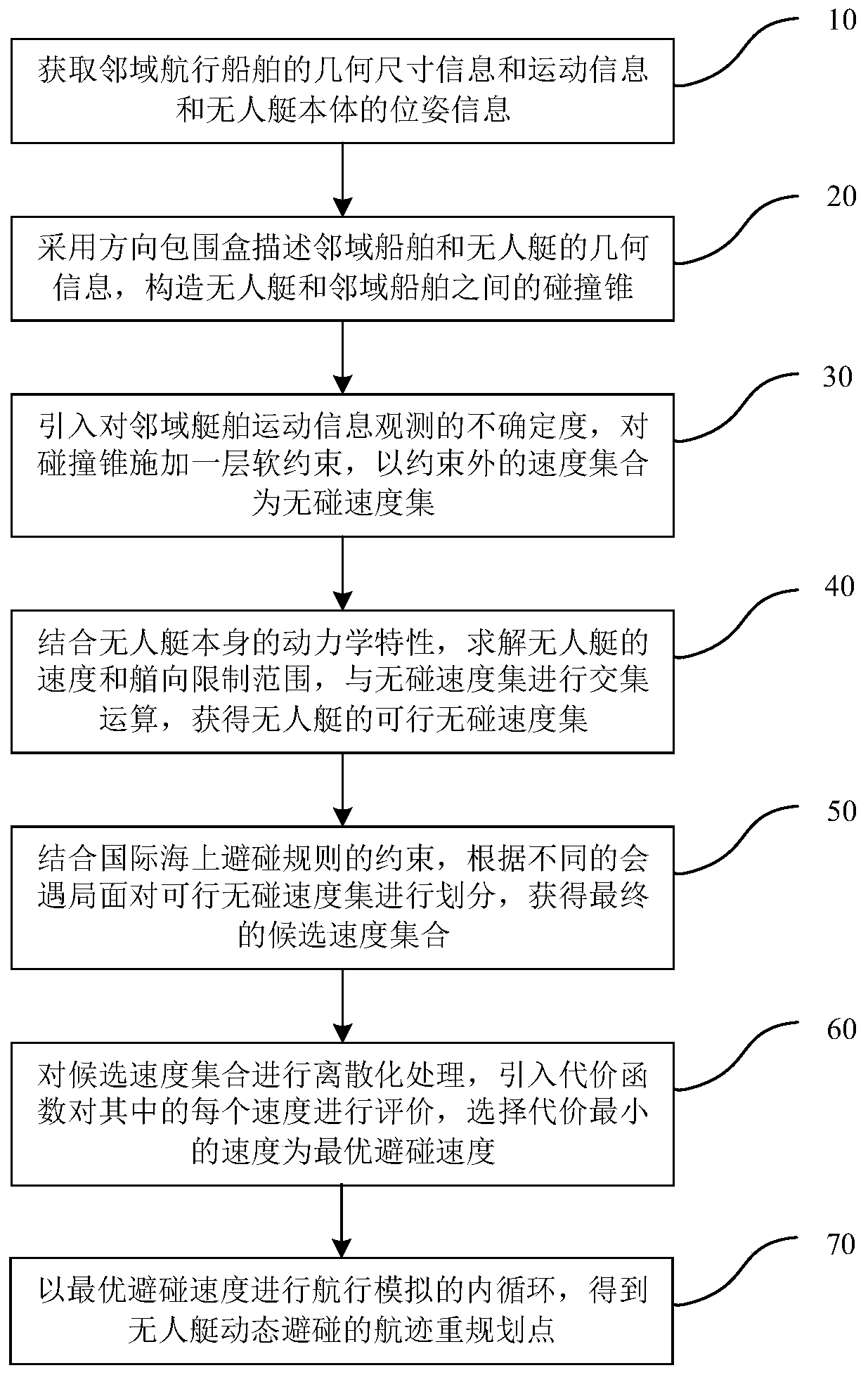
[0066] This embodiment provides a dynamic collision avoidance method for surface unmanned boats based on track re-planning, such as figure 1 shown, including the following steps:
[0067] The first step is to collect real-time data from boat-borne sensors and obtain key information in the process of dynamic collision avoidance; specifically: use the AIS system to obtain the geometric size information and motion information of ships sailing in the neighborhood, and use GPS to obtain the latitude and longitude of surface unmanned ships , use the electronic compass to obtain the three-dimensional heading angle of the surface unmanned vehicle;
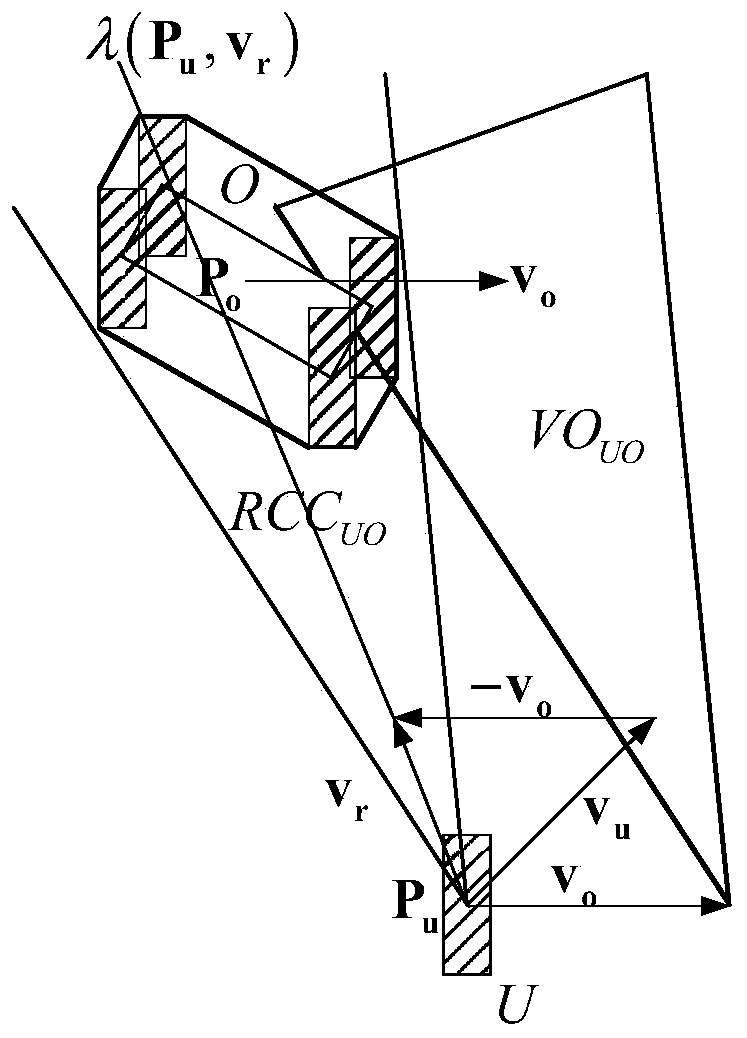
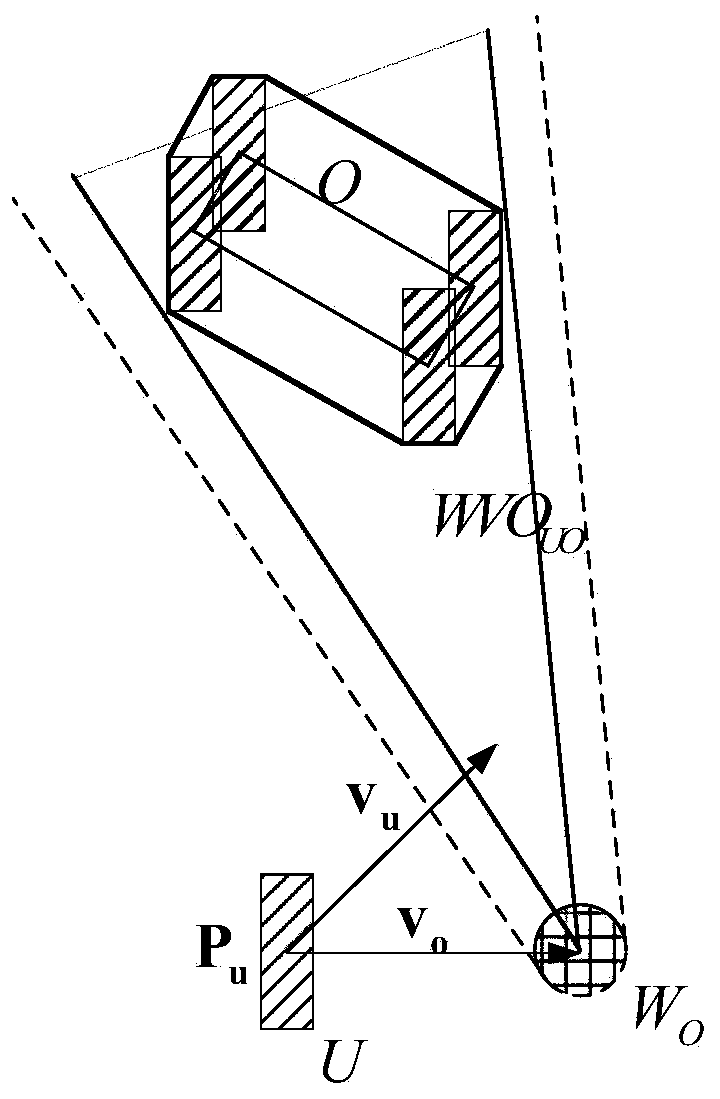
[0068] In the second step, according to the geometric information and motion information of the neighborhood navigation ship and the surface unmanned vessel, when constructing the collision cone area, the surface unmanned vehicle body and the neighborhood navigation vessel are described by the direction bounding box, as shown in figure 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More