

Street tree point cloud identification method based on laser reflection intensity
A technology of laser reflection and recognition method, which is applied in scene recognition, character and pattern recognition, image enhancement, etc., and can solve the problem that it is difficult to filter out objects with similar shapes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Preferred embodiments of the present invention will be described in more detail below with reference to the accompanying drawings. Although preferred embodiments of the invention are shown in the drawings, it should be understood that the invention may be embodied in various forms and should not be limited to the embodiments set forth herein.
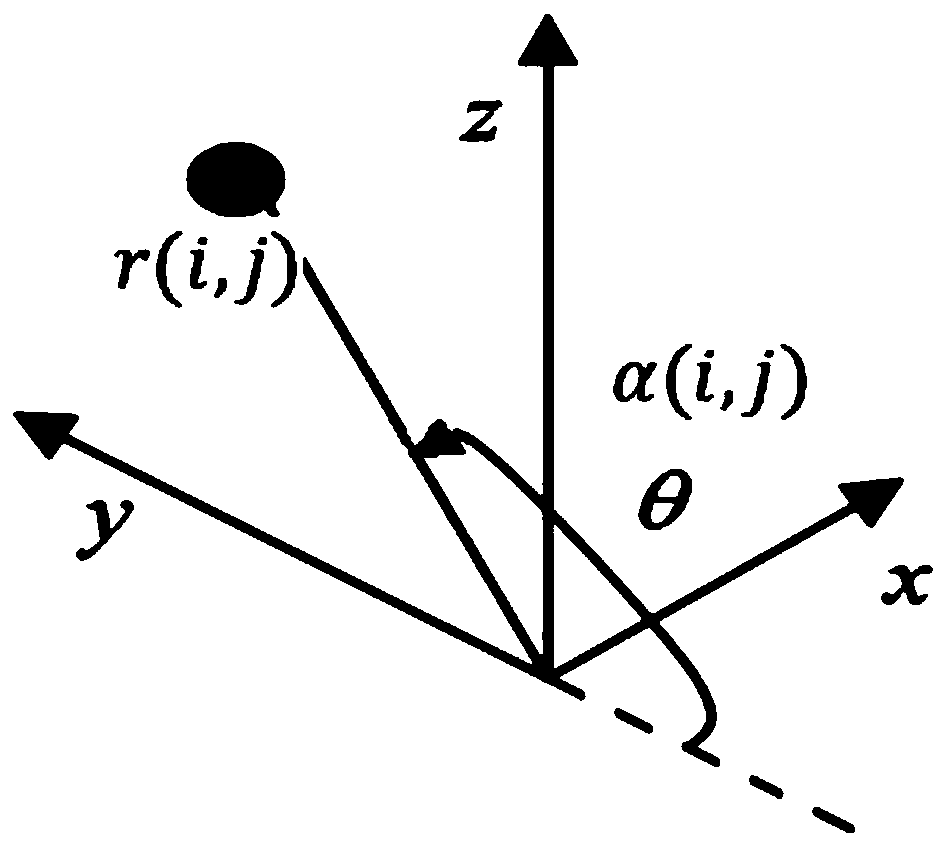
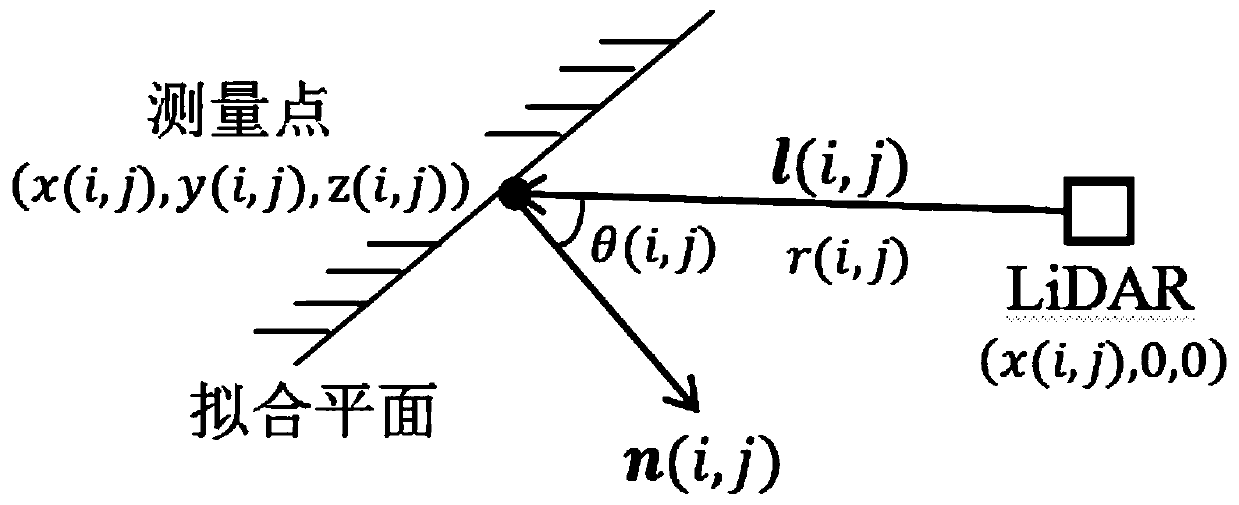
[0060] A street tree point cloud recognition method based on laser reflection intensity, the method includes the following steps: S1, establishing a two-dimensional laser radar laser reflection intensity correction model, taking the middle point of the two-dimensional laser radar scanning frame as the correction object, and extracting a standard diffuse reflection plate Based on the laser reflection intensity data at different distances r and incident angle θ, the distance correction model f of the laser reflection intensity is established r and the incident angle correction model f θ ;
[0061] S1-1. Fixed 2D lidar incident an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More