

Three-dimensional multi-target tracking method fusing images and laser point clouds
A multi-target tracking and laser point cloud technology, applied in the field of three-dimensional multi-target tracking, can solve the problems of tracking loss and difficult identification of disappearing targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific preferred examples, but the protection scope of the present invention is not limited thereby.
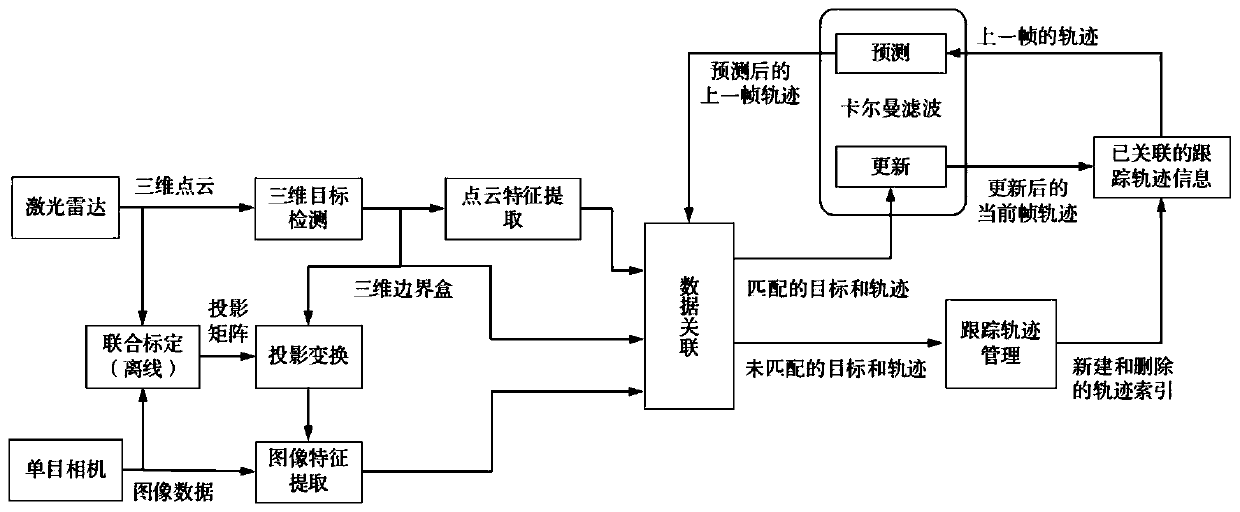
[0048] Such as figure 1 As shown, in this example, a three-dimensional multi-target tracking method for fusing images and laser point clouds, the steps include:
[0049] S1. Obtain point cloud data from lidar, detect the three-dimensional space position information of the target and extract point cloud features;
[0050] S2. Obtain image data from the camera, project the 3D boundary of the target onto the image plane, and extract image features of the projected area;
[0051] S3. Calculate the similarity matrix of the detected target and the tracking track on the point cloud three-dimensional space position information, point cloud features and image features, and merge the three similarity matrices;
[0052] S4. The combined similarity matrix is used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More