Method for controlling vehicle systems in motor vehicles
A technology of a vehicle system, a motor vehicle, applied in the field of motor vehicles, capable of solving problems such as delayed reaction time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
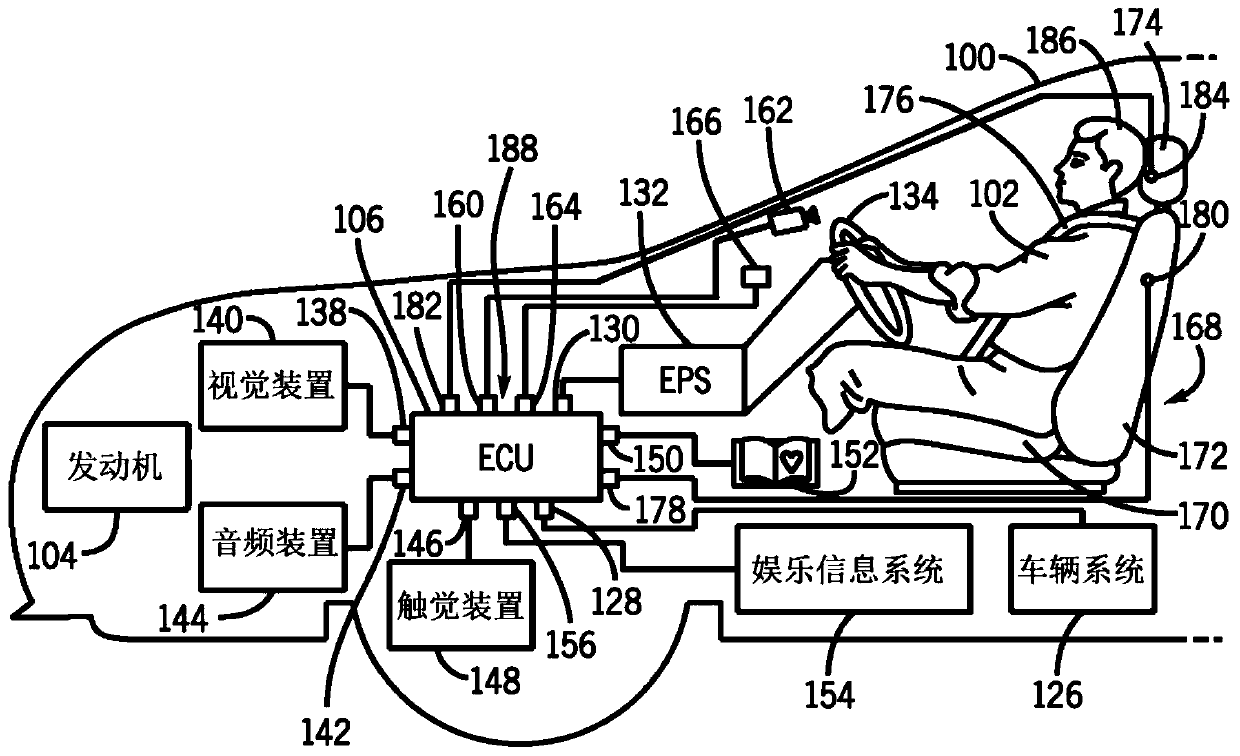
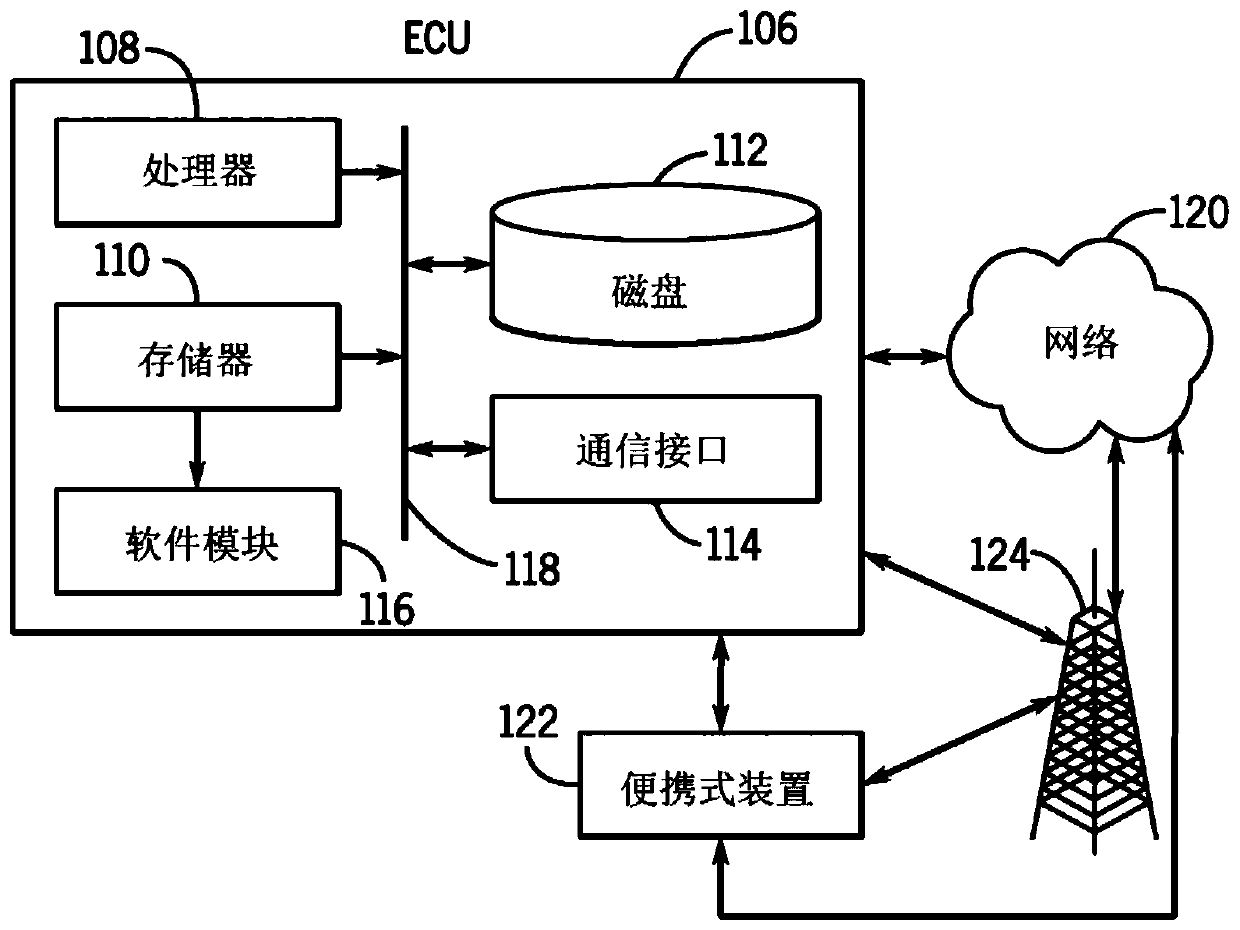
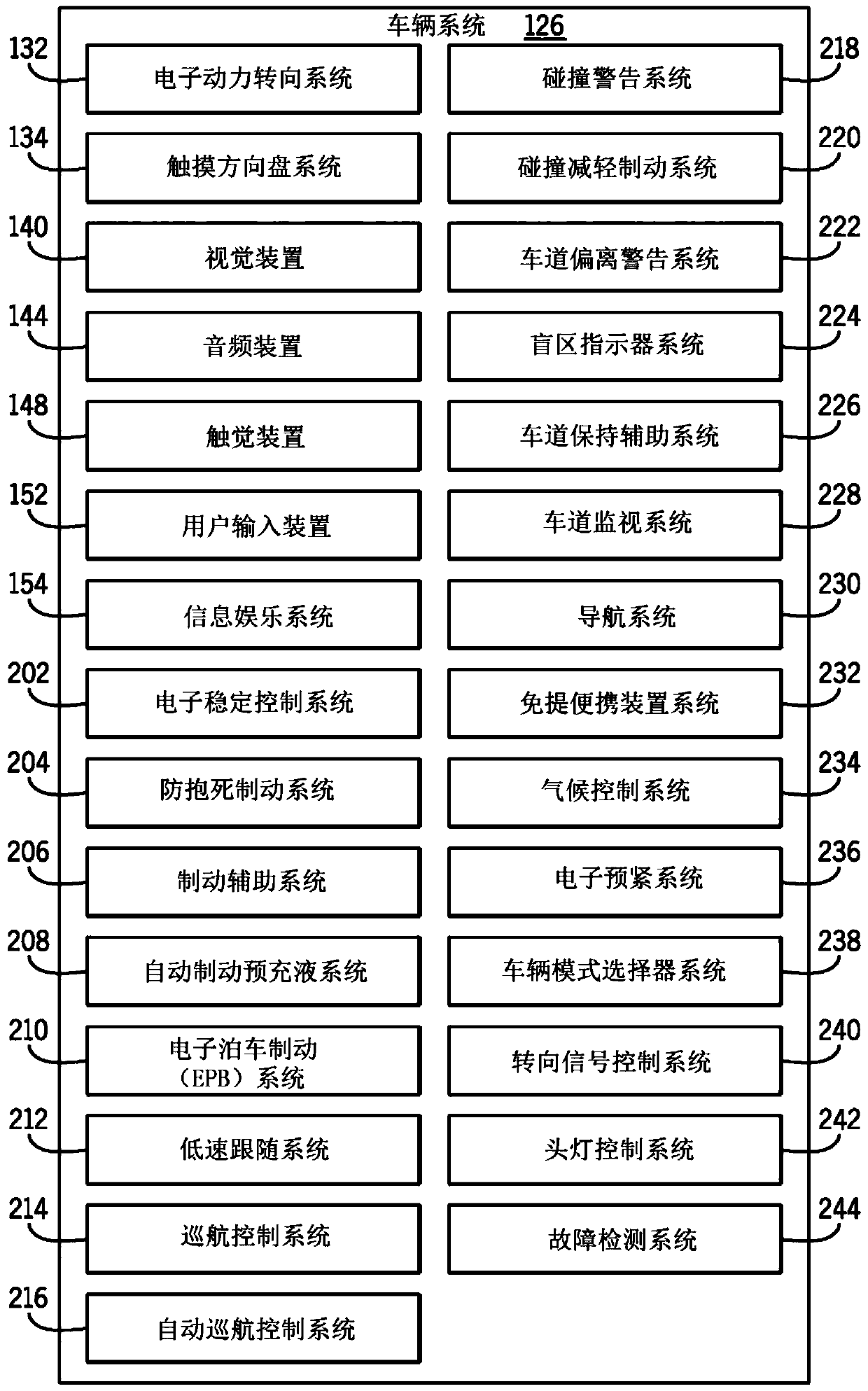
[0198] The following detailed description is intended to be exemplary and those of ordinary skill in the art will recognize that other embodiments and implementations are possible within the scope of the embodiments described herein. Example embodiments are first described generally with respect to a system overview including components of a motor vehicle, example vehicle systems and sensors, and monitoring systems and sensors. Following the general description, presented are systems and methods for assessing driver states and operational responses, including discussions of determining driver states, determining one or more driver states, determining combined driver states, and validating driver states. Exemplary implementations are also described for detecting driver states and exemplary operational responses of vehicle systems based on driver states and / or combined driver states. Additionally, embodiments are discussed that relate to various levels of operational response fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More