

Multistage variable-rigidity pneumatic soft actuator
A variable stiffness and actuator technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of small stiffness variation range, poor load capacity, slow response speed, etc., and achieve small size, wide load range, and light weight. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Describe technical scheme of the present invention in detail below in conjunction with accompanying drawing and embodiment:
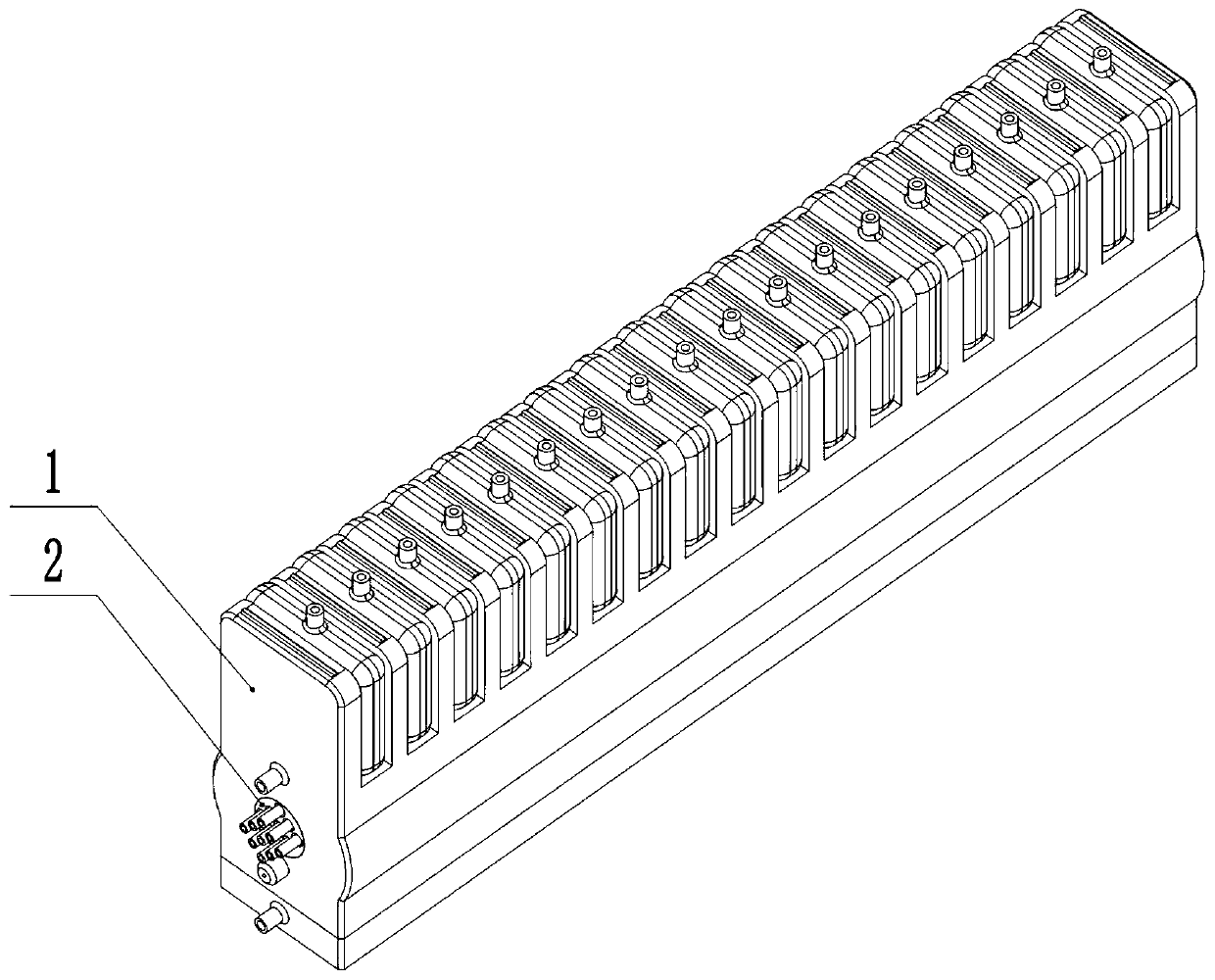
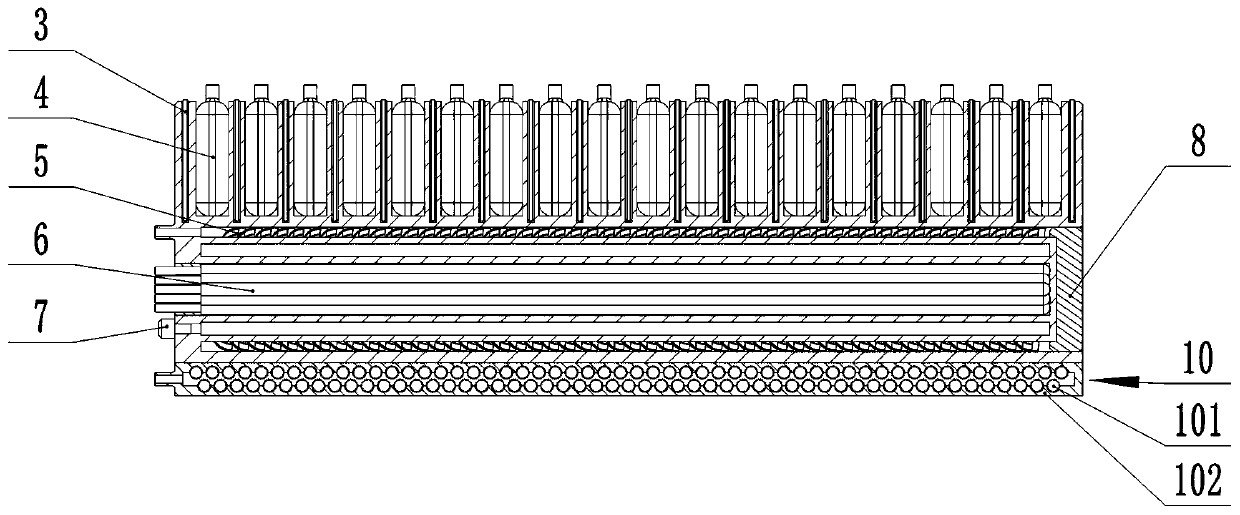
[0025] see Figure 1 to Figure 7 As shown, a multi-stage variable stiffness pneumatic soft actuator includes a first soft frame 1, a first end cover 2, a hard baffle 3, an air bag 4, a contact type helical elastic variable stiffness element 5, a pneumatic tubular variable Stiffness element 6 , dustproof ventilation plug 7 , second end cover 8 , contact tooth deformation stiffness module 10 .
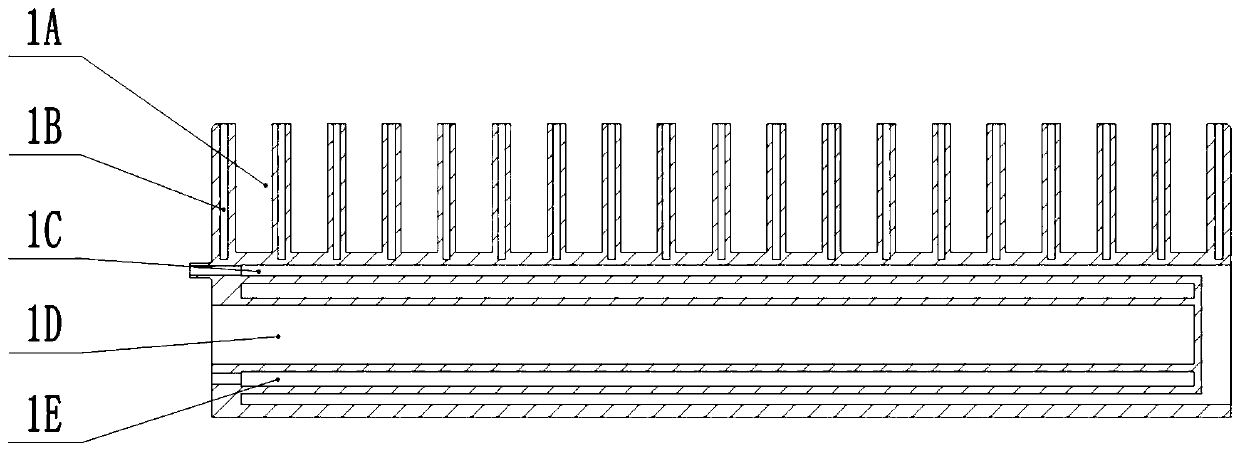
[0026] Among them, the top of the first software frame 1 is provided with a plurality of U-shaped grooves 1A arranged in parallel, and a plurality of independently driven airbags 4 are fixed in the U-shaped grooves 1A on the first software frame 1 for driving the actuators. A vertical slot 1B is provided in the partition between the two U-shaped slots 1A, and a hard baffle 3 is fixed in the slot 1B in order to allow the driven airbag 4 to achieve a better ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More