

Target detection method and target detection device
A target detection and target object technology, applied in image data processing, instruments, calculations, etc., can solve the problem of low detection accuracy, unable to ensure safe driving of unmanned equipment, and unable to accurately determine the position of obstacles around unmanned equipment. posture, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the purpose, technical solution and advantages of the present application clearer, the technical solution of the present application will be clearly and completely described below in conjunction with specific embodiments of the present application and corresponding drawings. Apparently, the described embodiments are only some of the embodiments of the present application, rather than all the embodiments. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
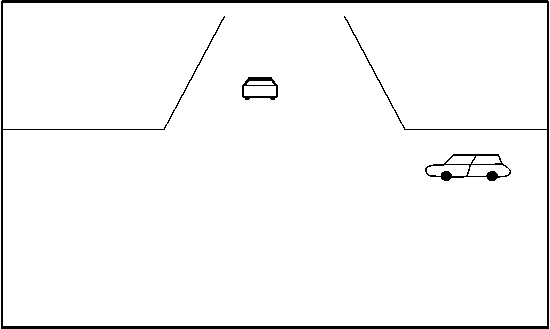
[0044] In practical applications, unmanned driving equipment can collect images during driving to obtain image data, and then convert the image data to obtain pseudo point cloud data. The pseudo point cloud data mentioned here does not refer to the actual point cloud data collected by lidar, but the data similar to point cloud obtained by converting t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More