

ORBSLAM2-based unmanned aerial vehicle autonomous navigation method
A technology for autonomous navigation and drones, applied in image data processing, instruments, calculations, etc., can solve problems such as large positioning errors, judging pose deviations, drones hovering in corners and unable to avoid obstacles, etc., to improve convergence Accurate effect of speed and pose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The invention will be described in further detail below in conjunction with the accompanying drawings.
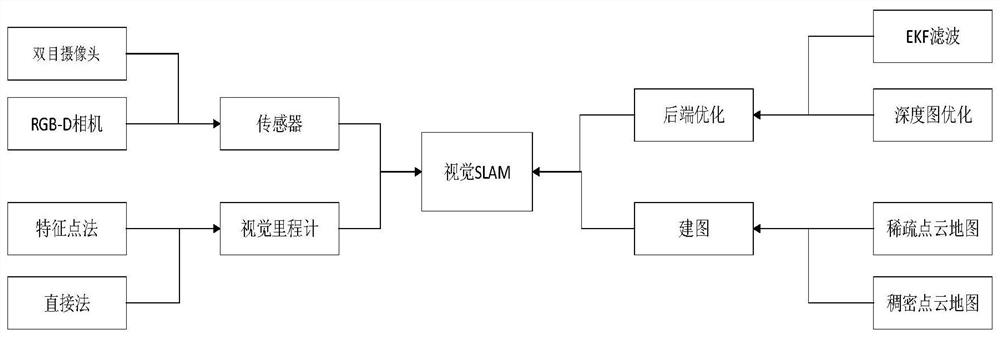
[0091] An autonomous navigation method for UAV based on ORB_SLAM2, such as figure 1 The method includes visual SLAM front-end design, visual SLAM back-end global optimization and mapping, and unmanned aerial vehicle path planning algorithm design.
[0092] (1) Visual SLAM front-end design
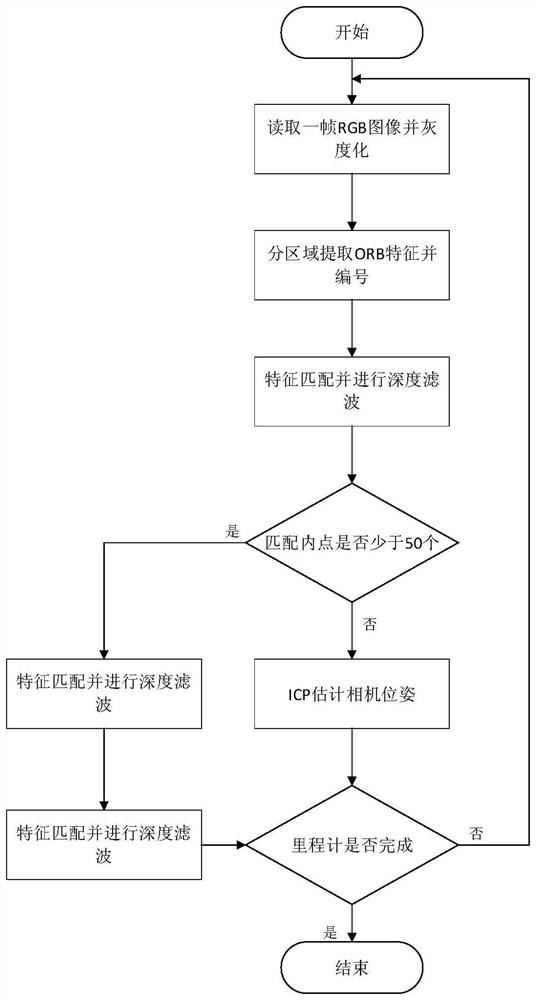
[0093] The visual SLAM front-end design includes ORB feature point extraction and brute force matching, and position estimation based on the ICP algorithm. The overall visual SLAM front-end design process is as follows: figure 2 shown. ORB feature point extraction consists of two parts: FAST corner point and BRIEF descriptor
[0094] FAST corner point is a relatively special pixel point. Local pixel blocks with obvious grayscale changes in the image represent the characteristics of the image. The idea of FAST corner point monitoring process: compare the grayscale of a pixel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More