Pose tracking method, pose tracking device and electronic equipment
A pose and algorithm technology, applied in the field of computer vision processing, can solve problems such as poor pose tracking robustness and tracking loss.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
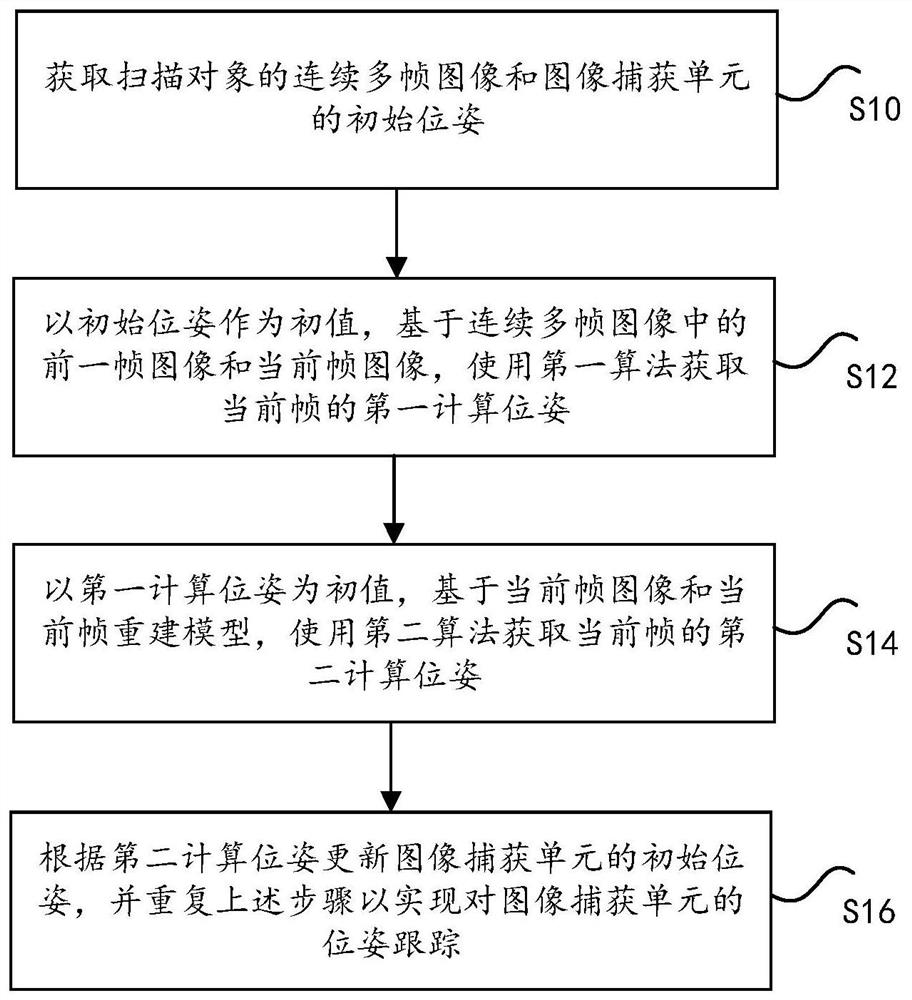
[0056] According to one aspect of the present invention, a pose tracking method is provided. refer to figure 1 , is a flowchart of an optional pose tracking method according to an embodiment of the present invention. Such as figure 1 As shown, the method includes the following steps:
[0057] S10: Acquire continuous multi-frame images of the scanned object and the initial pose of the image capture unit;
[0058] S12: Using the initial pose as an initial value, based on the previous frame image and the current frame image in the continuous multi-frame images, using the first algorithm to obtain the first calculated pose of the current frame;
[0059] S14: Using the first calculated pose as an initial value, based on the current frame image and the current frame reconstruction model in the continuous multi-frame images, use the second algorithm to obtain the second calculated pose of the current frame;
[0060] S16: Update the initial pose of the image capture unit according...
Embodiment 2
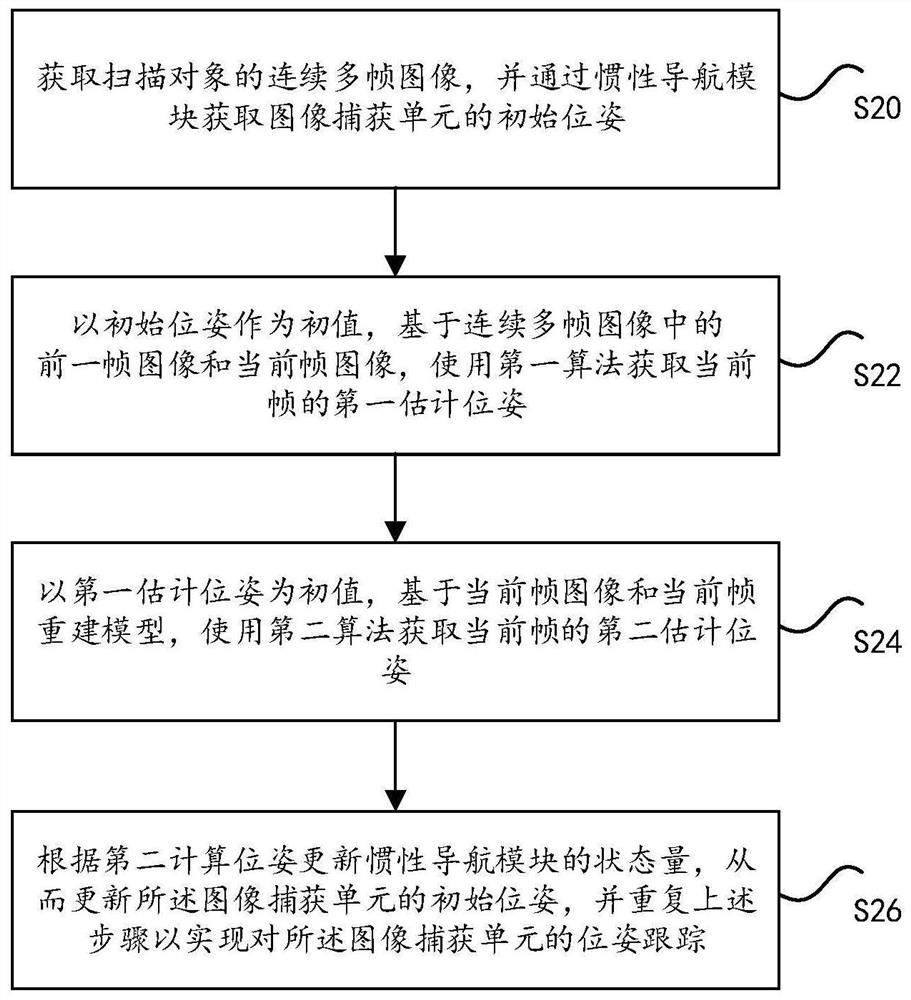
[0077] According to another aspect of the embodiments of the present invention, a pose tracking method based on an inertial navigation module is also provided, so as to further improve the tracking robustness of the image capture unit. refer to figure 2 , is a flow chart of an optional inertial navigation module-based pose tracking method according to an embodiment of the present invention. like figure 2 As shown, the method includes the following steps:
[0078] S20: Obtain continuous multi-frame images of the scanned object, and obtain the initial pose of the image capture unit through the inertial navigation module;
[0079] S22: Using the initial pose as an initial value, based on the previous frame image and the current frame image in the continuous multi-frame images, using the first algorithm to obtain the first calculated pose of the current frame;
[0080] S24: Using the first calculated pose as an initial value, based on the current frame image and the current f...
Embodiment 3
[0094] According to yet another aspect of the embodiments of the present invention, a pose tracking method including relocalization is also provided, which can quickly restore the pose tracking of the image capture unit in the case of tracking loss, and re-estimate the pose of the image capture unit , to further improve the robustness of image capture unit tracking and improve user experience. refer to Figure 5 , is a flow chart of an optional pose tracking method including relocalization according to an embodiment of the present invention. like Figure 5 As shown, the method includes the following steps:
[0095] S50: Obtain continuous multi-frame images of the scanned object, and obtain the initial pose of the image capture unit through the inertial navigation module;
[0096] S52: Using the initial pose as an initial value, based on the previous frame image and the current frame image in the continuous multi-frame images, using the first algorithm to obtain the first ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More