

An Integrity Protection Level Optimization Method for Unmanned Aerial Vehicle Swarm Cooperative Navigation
A level of protection and collaborative navigation technology, applied in the field of navigation, can solve the problems of unachievable integrity level, collaborative auxiliary information waste, optimization, etc., to achieve the effect of overcoming information waste, ensuring usefulness, and ensuring integrity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The accompanying drawings constituting a part of the present invention are used to provide further understanding of the present invention, and the exemplary embodiments of the present invention and their descriptions are used to explain the present invention and do not constitute an improper limitation of the present invention.
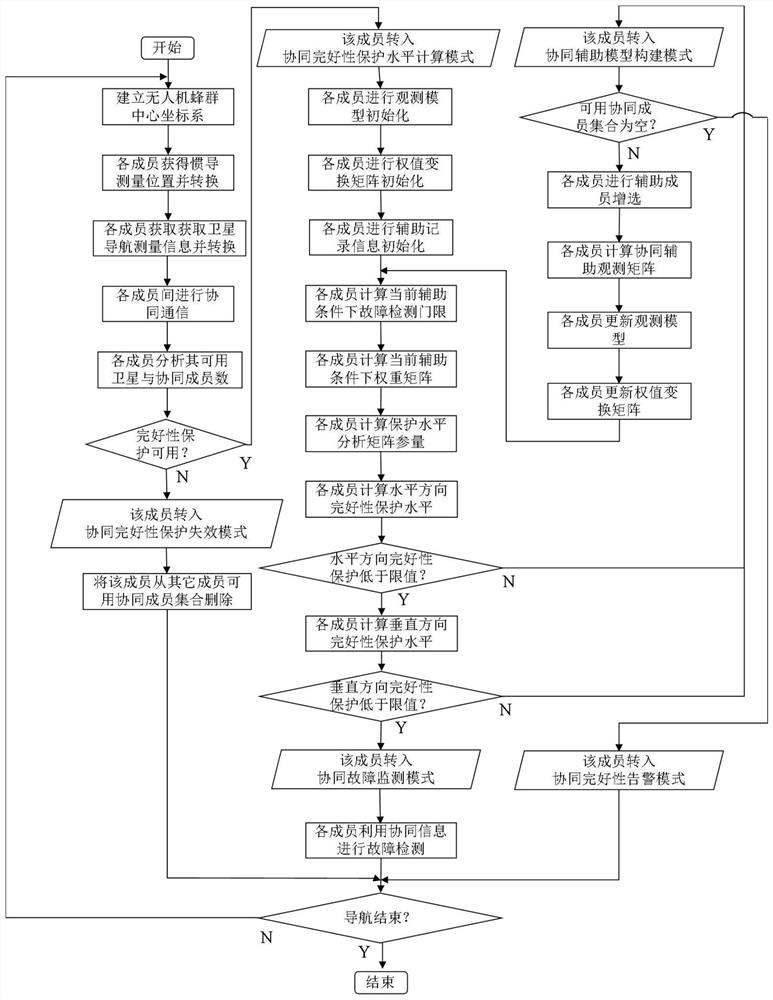
[0074] like figure 1 As shown, this embodiment provides an integrity protection level optimization method for cooperative navigation of drone swarms; the details are as follows:
[0075] Step (1): Let the current time be t, the number of drone swarm members be n, and the geometric center of the drone swarm is the origin to establish the coordinate system of the drone swarm center;
[0076] Step (2): each member of the drone swarm obtains its own position vector under the geographic coordinate system according to its airborne inertial navigation system, and converts it to the central coordinate system of the drone swarm;
[0077] Step (3): Each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More