

Double-arm self-collision detecting method and computer readable storage medium
A technology of self-collision detection and collision detection, applied in the field of robotics, can solve problems such as reducing the working space of the left and right arm cooperation area, collision detection, and inability to complete tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
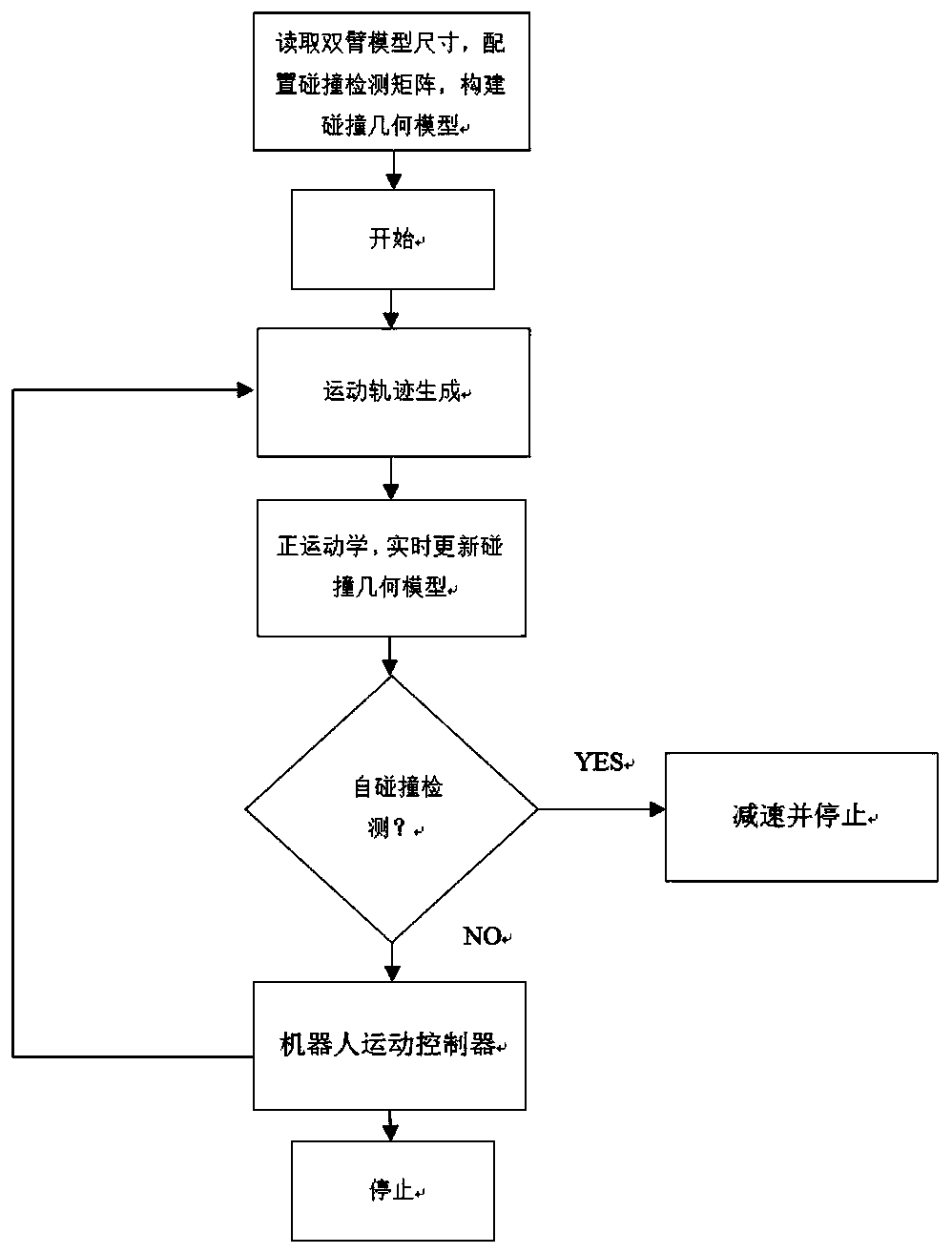
[0081] like figure 1 As shown, this embodiment provides a dual-arm self-collision detection method, which uses the bounding box for rough collision detection and then uses the grid for fine collision detection; for a dual-arm collaborative robot in a certain application scenario, a given task level Motion planning requires real-time detection of the collision between the left arm and the right arm, the left arm or the right arm and the body during the motion planning process of the arms, and the robot controller responds in time according to the collision feedback signal, such as replanning or deceleration, Stop operation and other measures to ensure that the robot can complete the task safely.
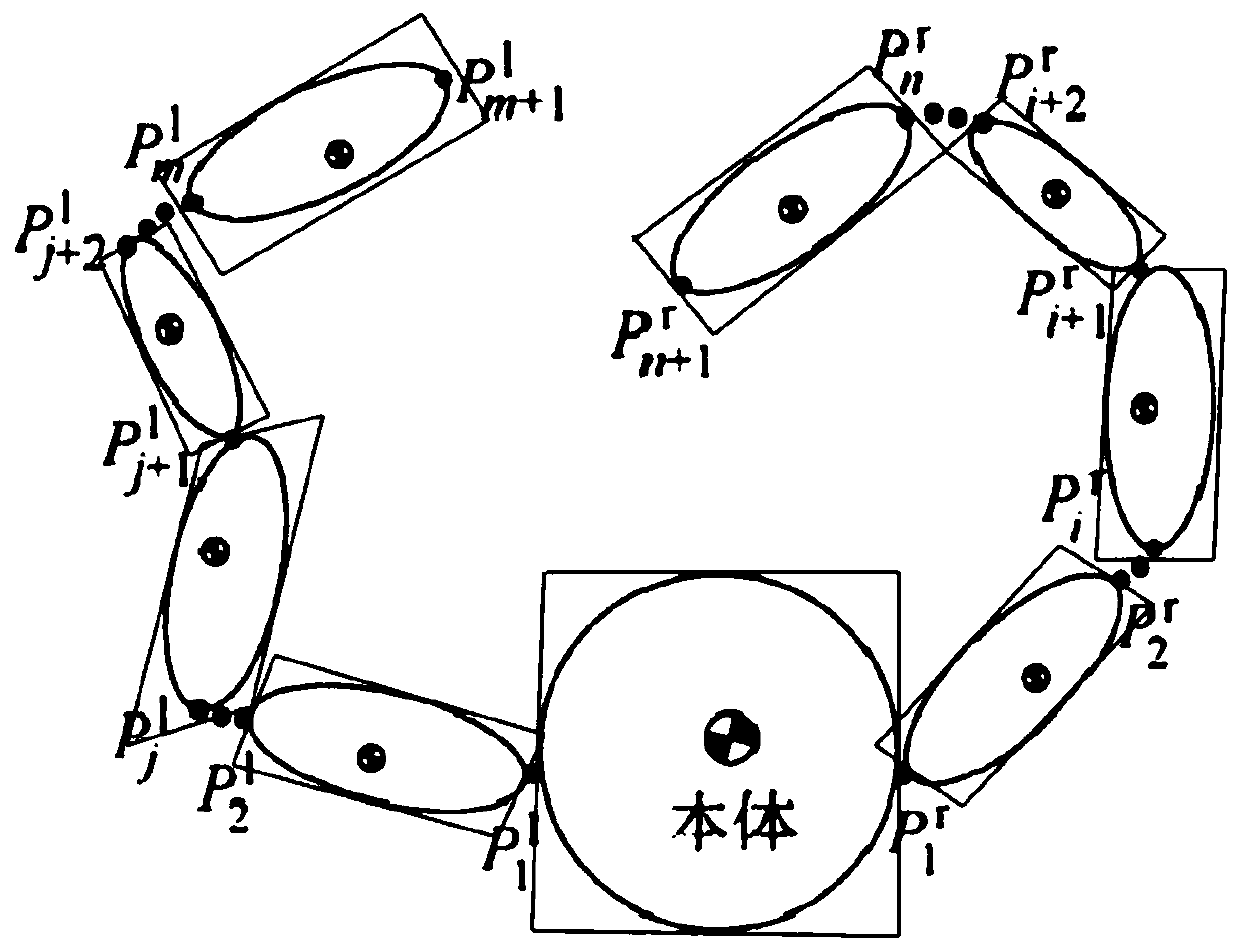
[0082] The collision model of this example mainly includes two layers: the outer layer is based on the idea of the bounding box, which uses the basic geometric model to envelop the actual model, and the inner layer is the actual model, which is composed of triangular meshes after th...
Embodiment 2
[0157] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, the method in the first embodiment is implemented.
[0158] The embodiment of the present application is only illustrative. For example, the division of the units is only a logical function division. In actual implementation, there may be other division methods. For example, multiple units or components can be combined or integrated into Another system, or some features may be ignored, or not implemented. In another point, the mutual coupling or direct coupling or communication connection shown or discussed may be through some communication interfaces, and the indirect coupling or communication connection of devices or units may be in electrical, mechanical or other forms.
[0159] The units described as separate components may or may not be physically separated, and the components shown as units may or may not be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More