A method, device and system for precise parking of trucks in shore crane area
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A truck and precise technology, applied in the field of intelligent transportation, can solve the problems of slow speed, large error, unsuitable for precise parking of large trucks, etc., and achieve the effect of low implementation cost and strong portability
Active Publication Date: 2021-09-03
BEIJING TUSEN ZHITU TECH CO LTD
View PDF18 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] At present, the most common vehicle parking methods are to locate vehicles and parking spaces through vehicle positioning equipment or vehicle cameras. This method has disadvantages such as large errors and slow speeds, and is especially not suitable for precise parking of large trucks.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
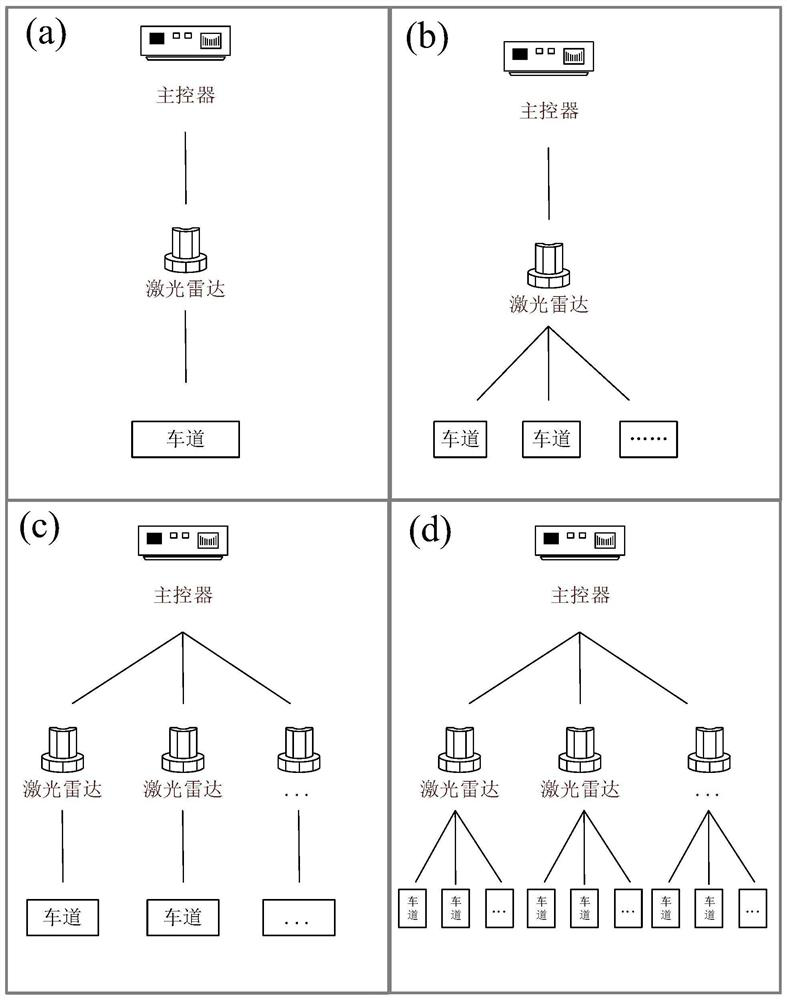
[0128] like Figure 5 As shown, the quay crane numbered AD1000 spans 6 lanes numbered E1~E6, and the bottom of the contact beam of the quay crane is equipped with 6 laser radars numbered Lidar1~Lidar6, and Lidar1~Lidar6 scan E1~Lidar6 respectively. E6, that is, each laser radar is responsible for scanning a lane, and the main controller M is connected to the laser radars Lidar1~Lidar6, and is responsible for the precise parking of trucks on each lane under the shore crane AD1000.
[0129] At a certain moment, the numbers of the trucks driving on the lanes E1-E6 are K005, K006, and K007 respectively. Among them, the trucks K005 and K006 are loaded with containers and are carrying out the container loading task. The truck K007 was not loaded with containers, and was not performing container loading and unloading tasks. The vehicle model of the truck K005 is SQ05, the vehicle model of the truck K006 is SQ06, and the vehicle model of the truck K007 is SQ07.
[0130] The main co...
Embodiment 2
[0141] like Figure 6 As shown, the quay crane numbered AD1000 spans 6 lanes numbered E1~E6 respectively. Two laser radars numbered Lidar1 and Lidar2 are installed at the bottom of the contact beam of the quay crane. Lidar1 is responsible for scanning the lanes E1~E3 , Lidar2 is responsible for scanning E4~E6, that is, each lidar is responsible for scanning 3 lanes, and the main controller M is connected to lidar Lidar1 and Lidar2, and is responsible for the precise parking of trucks on each lane under the shore crane AD1000.
[0142]At a certain moment, there are three driving vehicles K005, K006, and K007 on the lane spanned by the shore crane AD1000, which are respectively located on the lanes E2, E4, and E6. Among them, the trucks K005, K006, and K007 were not loaded with containers, the trucks K005, K006 were performing container unloading tasks, and the truck K007 was not performing container loading and unloading tasks. The vehicle model of the truck K005 is SQ05, the ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
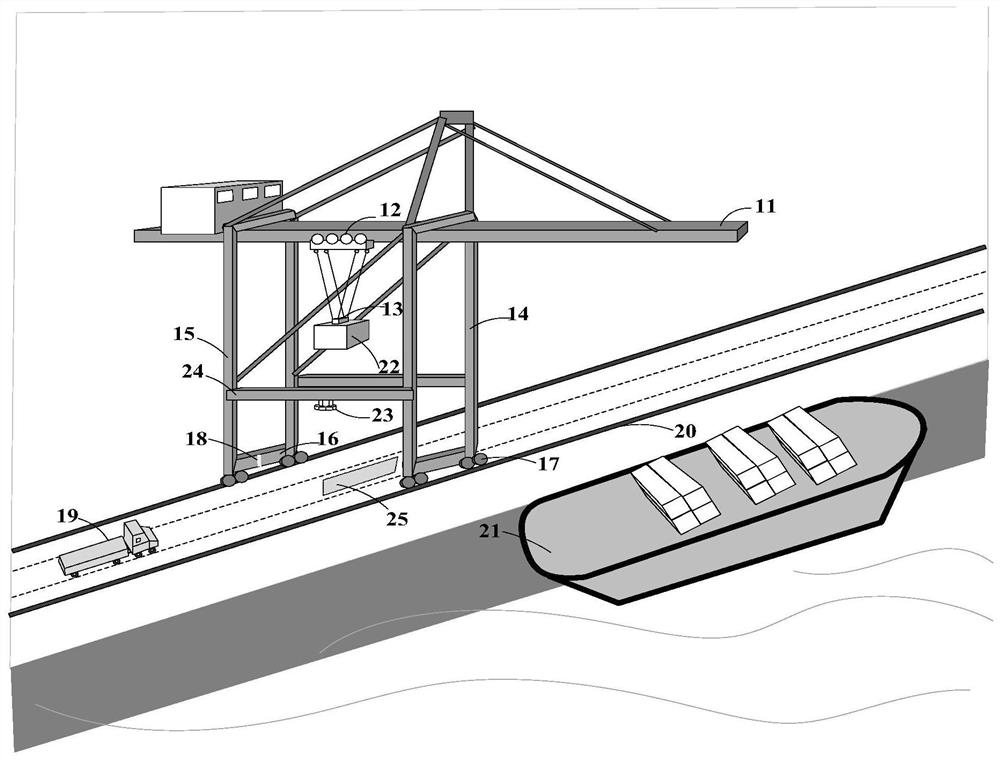
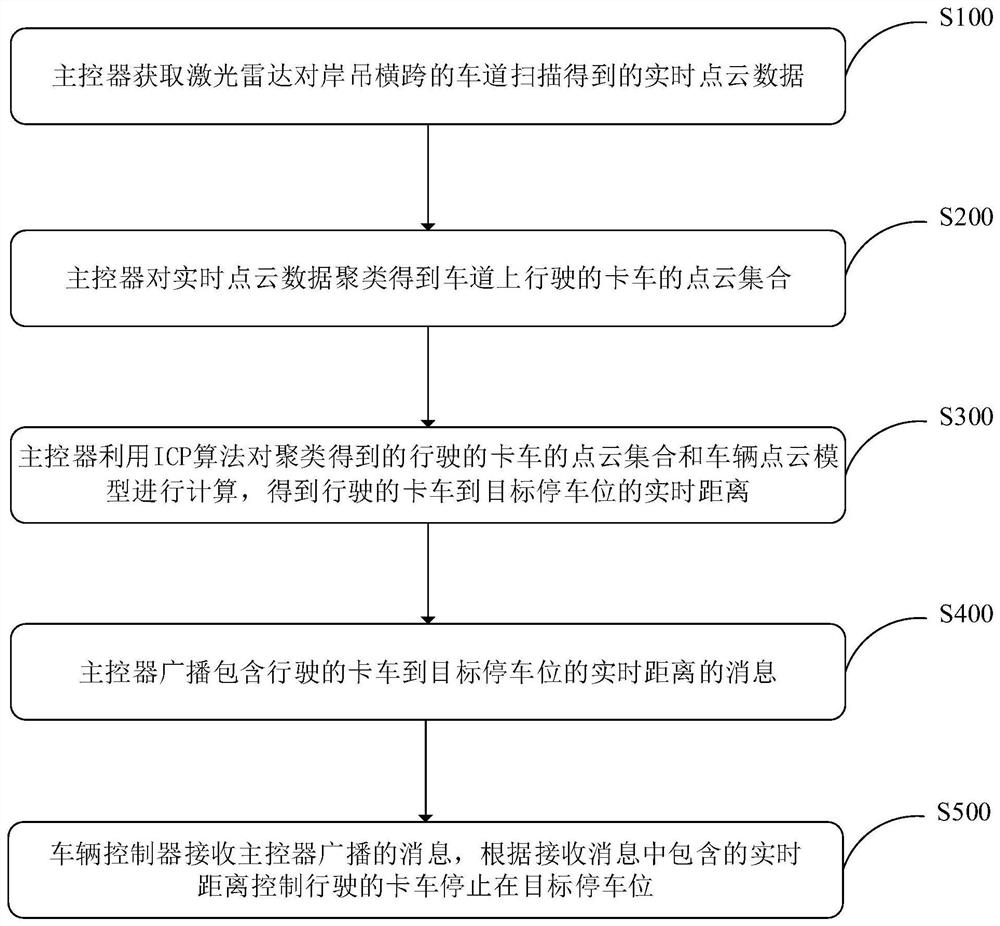
Embodiments of the present application provide a method, device, and system for precise parking of trucks in a shore crane area. The method for precise parking of trucks in the shore crane area includes: obtaining real-time point cloud data obtained by scanning the lane spanned by the lidar on the opposite shore crane; clustering the real-time point cloud data to obtain a point cloud set of trucks traveling on the lane; The point cloud collection of the truck and the vehicle point cloud model are calculated to obtain the real-time distance from the driving truck to the target parking space; the vehicle point cloud model is the point cloud obtained by scanning the truck parked in the target parking space with lidar in advance. Collection; broadcasts a message containing the real-time distance, so that the vehicle controller controls the moving truck to stop at the target parking space according to the real-time distance contained in the message. The precise parking method for trucks in the shore crane area provided by the present application can control the truck to accurately stop at the target parking space at one time, and the entire parking process is automatically completed, which can achieve centimeter-level accuracy and has low implementation cost.
Description
technical field [0001] The embodiments of the present application relate to the technical field of intelligent transportation, and more specifically, the embodiments of the present application relate to a method, equipment and system for precise parking of trucks in a shore crane area. Background technique [0002] This section is intended to provide a background or context to the implementations of the application that are recited in the claims. The descriptions herein are not admitted to be prior art by inclusion in this section. [0003] At present, the common vehicle parking methods are mostly to locate vehicles and parking spaces through vehicle-mounted positioning equipment or vehicle-mounted cameras. This method has disadvantages such as large errors and slow speeds, and is especially not suitable for precise parking of large trucks. [0004] Shoreside container cranes, also known as quayside cranes, are special cranes for loading and unloading containers at port ter...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More