Local path planning and tracking method suitable for vehicle type robot
A local path planning and local path technology, applied in vehicle position/route/height control, instruments, motor vehicles, etc., can solve the problem that the movement flexibility is not as good as that of the disc robot, and the local path planning and tracking of the disc robot cannot be directly Applicable to vehicle models, robots and other issues to achieve the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0048] The invention relates to the improvement of the local path planning and tracking method of the cleaning robot. The improved local path planning and tracking method can be well applied to the model robot to overcome the insufficient cleaning ability of the disc-shaped robot in a large scene. The problem of inefficiency.
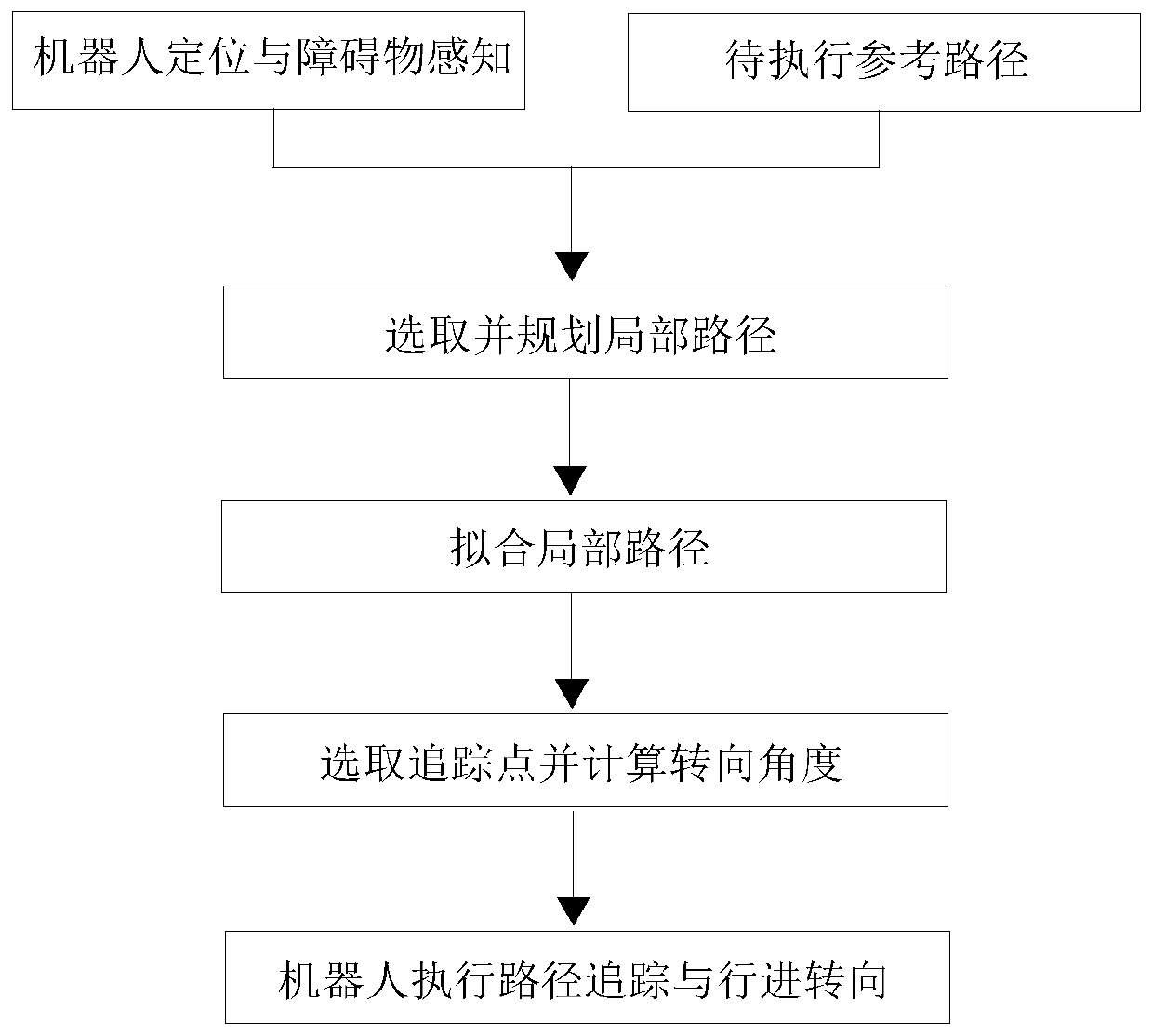
[0049] Specifically, such as figure 1 As shown, this kind of local path planning and tracking method applicable to vehicle type robots disclosed by the present invention comprises the following steps:
[0050] (1) Select the reference path to be executed in the area to be cleaned, locate the model robot and sense the surrounding obstacles, and obtain the corresponding reference information.
[0051] In this embodiment, the reference path is the global coverage path of the area to be cleaned obtained according to the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com