

Dynamic map construction method, system and medium based on lidar
A lidar and map construction technology, applied in image analysis, image enhancement, image data processing, etc., can solve problems such as high security risks, high costs, and blind spots, and achieve the effect of reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
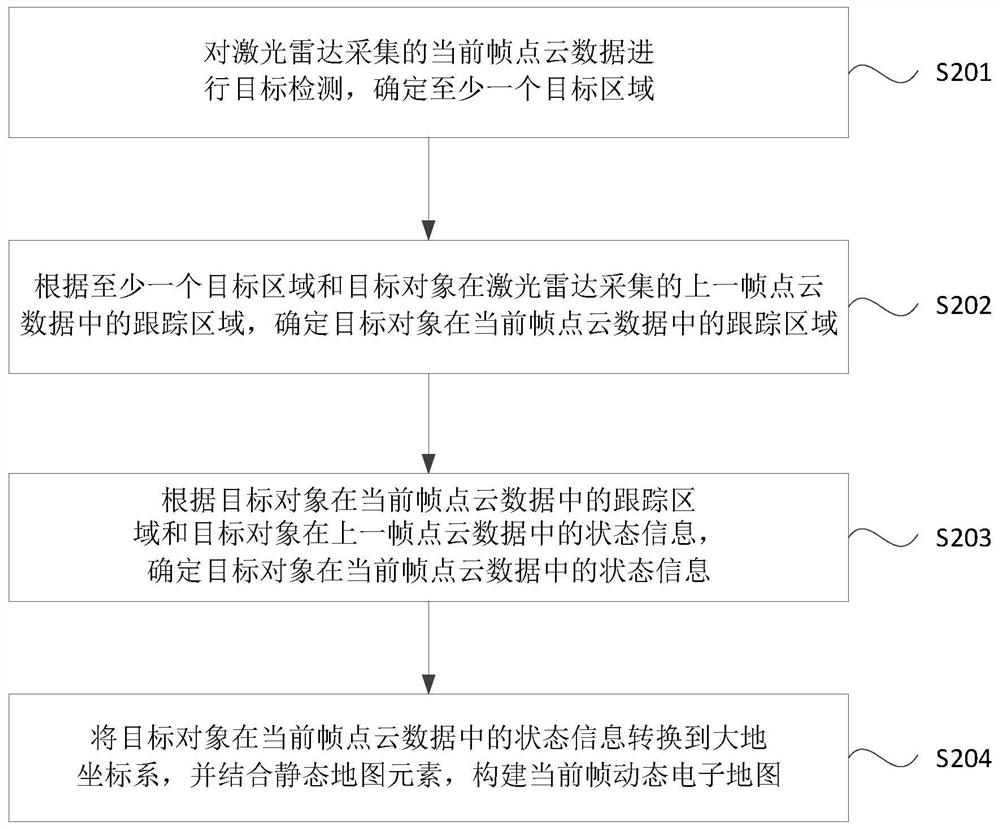
[0035] Figure 2A It is a flowchart of a lidar-based map construction method in Embodiment 1 of the present invention, Figure 2B and Figure 2D It is a schematic diagram of the current frame point cloud data provided by the embodiment of the present invention; Figure 2C is a schematic diagram of the last frame of point cloud data provided by the embodiment of the present invention. This embodiment is applicable to the construction of a dynamic electronic map containing real-time state information of a target object based on point cloud data collected by lidar. The method can be executed by the processing device in the surveying and mapping system of the embodiment of the present invention, and the processing device can be realized by software and / or hardware. like Figure 2A As shown, the method specifically includes the following steps:
[0036] S201. Perform target detection on current frame point cloud data collected by lidar, and determine at least one target area. ...
Embodiment 2
[0060] image 3 It is a flow chart of a lidar-based map construction method in Embodiment 2 of the present invention. This embodiment is based on the above-mentioned embodiment, and further optimization is carried out. Specifically, how to make the current frame point collected by the lidar Object detection is performed on the cloud data to determine the specific situation profile of at least one target area. like image 3 As shown, the operation process includes the following steps:
[0061] S301. Filter out the interfering point cloud data in the current frame of point cloud data collected by the lidar, and determine a region to be detected.
[0062] Wherein, the interfering point cloud data may be point cloud data corresponding to non-obstacles in the point cloud data, for example, it may include point cloud data corresponding to static objects (such as roads, buildings, rivers, grasslands, etc.) Noisy point cloud data during acquisition, etc.
[0063] Optionally, since...
Embodiment 3
[0080] Figure 4 It is a flow chart of a lidar-based map construction method in Embodiment 3 of the present invention. This embodiment is based on the above-mentioned embodiments and further optimized, and specifically provides a lidar-based map construction method. A preferred instance of , optionally, such as Figure 4 As shown, the method of the present embodiment includes the following steps:
[0081] S401. Convert the point cloud data of the lidar deployed at a fixed position from a radar coordinate system to a geocentric coordinate system.
[0082] Optionally, in this embodiment of the present invention, for each laser radar deployed at a fixed position, its point cloud data is sequentially converted from its radar coordinate system to a unified geocentric coordinate system. For example, it may be to convert the point cloud data of the lidar from its radar coordinate system to the 2000 National Geodetic Coordinate System (ie, CGCS2000 coordinate system) as the geocentr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More