Cluster unmanned aerial vehicle numbering method and terminal
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A drone and numbering technology, applied in the field of drones, can solve the problems of tediousness and heavy workload, and achieve the effect of high numbering efficiency
Active Publication Date: 2020-08-18
SHENZHEN HIGHGREAT TECH DEV CO LTD
View PDF8 Cites 2 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
In the existing technology, the method of manual numbering is adopted, but in the formation of
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Example Embodiment
[0082] Example one
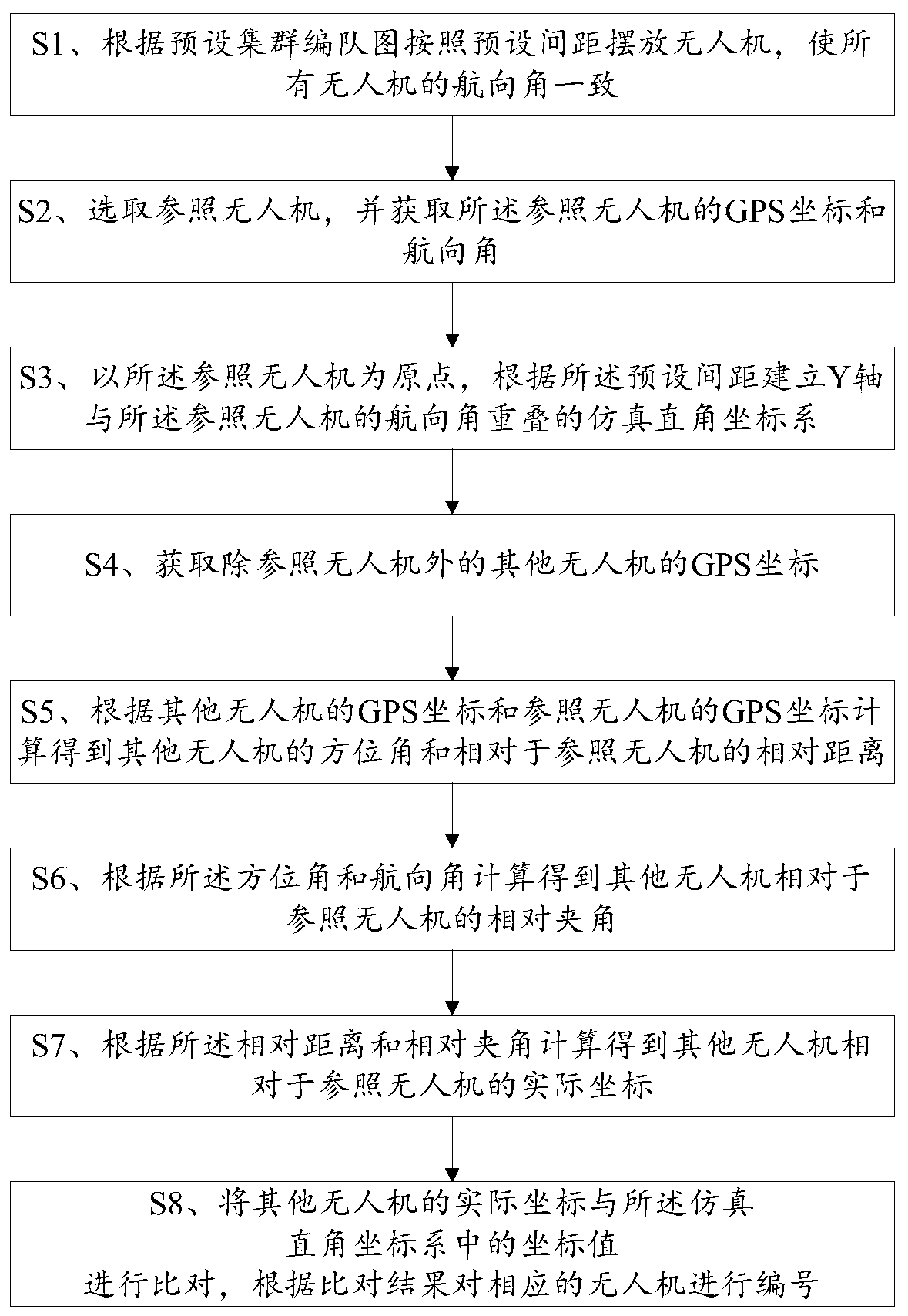
[0083] Please refer to figure 1 , The first embodiment of the present invention is a numbering method of cluster drones, which includes the following steps:
[0084] S1. Place drones at preset intervals according to the preset cluster formation map, so that the heading angles of all drones are consistent.
[0085] The UAV used in this embodiment is an RTK differential positioning UAV. Before placing the UAV, the UAV needs to be powered on. The cluster formation diagram can be designed as required. For example, it can be designed as a rectangle and preset The spacing can be set as required, for example, it can be 1 m. In addition, before step S1, the total number of drones needs to be obtained. According to the total number, the number of rows and columns of the rectangular formation chart can be designed, which is also conducive to the subsequent judgment of the completion of numbering.
[0086] S2. Select a reference drone, and obtain the GPS coordinates and hea...
Example Embodiment
[0109] Example two
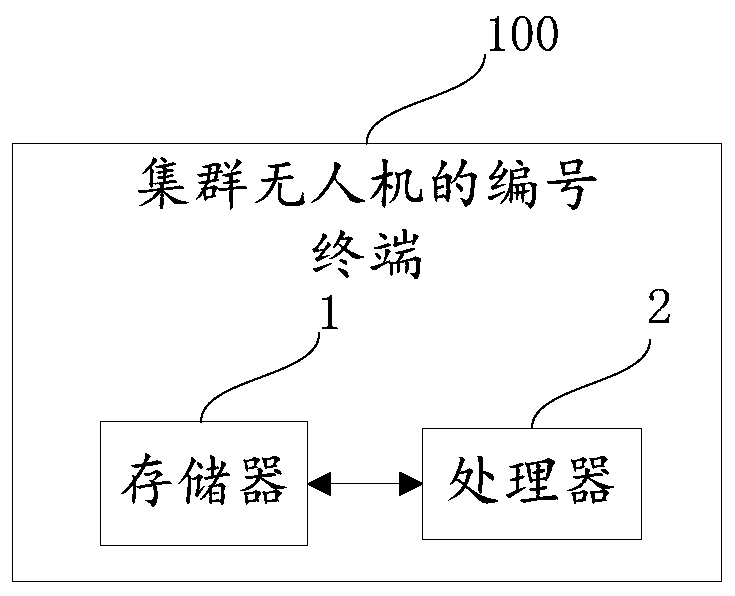
[0110] Please refer to image 3 , The second embodiment of the present invention is a numbering terminal 100 for cluster drones, which corresponds to the method of the first embodiment, and includes a memory 1, a processor 2, and is stored on the memory 1 and can be stored on the processor 2. When the processor 2 executes the computer program, the following steps are implemented:
[0111] Place drones at preset intervals according to the preset cluster formation map, so that the heading angles of all drones are consistent;
[0112] Select a reference drone, and obtain the GPS coordinates and heading angle of the reference drone;
[0113] Using the reference drone as the origin, establishing a simulated rectangular coordinate system in which the Y axis overlaps the heading angle of the reference drone according to the preset distance;
[0114] Obtain the GPS coordinates of other drones except the reference drone;
[0115] Calculate the azimuth angle of other drones ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a cluster unmanned aerial vehicle numbering method and a terminal. The method comprises the following steps: placing unmanned aerial vehicles; acquiring a GPS coordinate and acourse angle of a reference unmanned aerial vehicle; taking the reference unmanned aerial vehicle as an original point, and establishing a simulation rectangular coordinate system of which the Y axisis overlapped with the course angle of the reference unmanned aerial vehicle; according to the GPS coordinates of the other unmanned aerial vehicles and the GPS coordinates of the reference unmanned aerial vehicle, calculating azimuth angles of the other unmanned aerial vehicles and relative distances relative to the reference unmanned aerial vehicle; calculating relative included angles of otherunmanned aerial vehicles relative to the reference unmanned aerial vehicle according to the azimuth angle and the course angle; calculating actual coordinates of other unmanned aerial vehicles relative to the reference unmanned aerial vehicle according to the relative distance and the relative included angle; comparing the actual coordinates of other unmanned aerial vehicles with the coordinate values in the simulation rectangular coordinate system, and numbering the corresponding unmanned aerial vehicles according to the comparison result. The unmanned aerial vehicle can be numbered automatically and quickly, and the efficiency is high.
Description
technical field [0001] The invention relates to the technical field of unmanned aerial vehicles, in particular to a numbering method and terminal of cluster unmanned aerial vehicles. Background technique [0002] In the UAV swarm performance, because it is necessary to know and debug each UAV in real time, it is necessary to number each UAV, so as to find and solve problems in time. In the prior art, the method of manual numbering is adopted, but in the formation of hundreds or thousands of UAVs, this method is not only a huge workload but also very cumbersome. Contents of the invention [0003] The technical problem to be solved by the present invention is to provide a numbering method and terminal for cluster drones, which can automatically and quickly complete the numbering of drones. [0004] In order to solve the problems of the technologies described above, the technical solution adopted in the present invention is: [0005] A method for numbering cluster drones, c...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More