

Numbering method and terminal of swarm drones
A drone and numbering technology, applied in the field of drones, can solve problems such as cumbersome and heavy workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
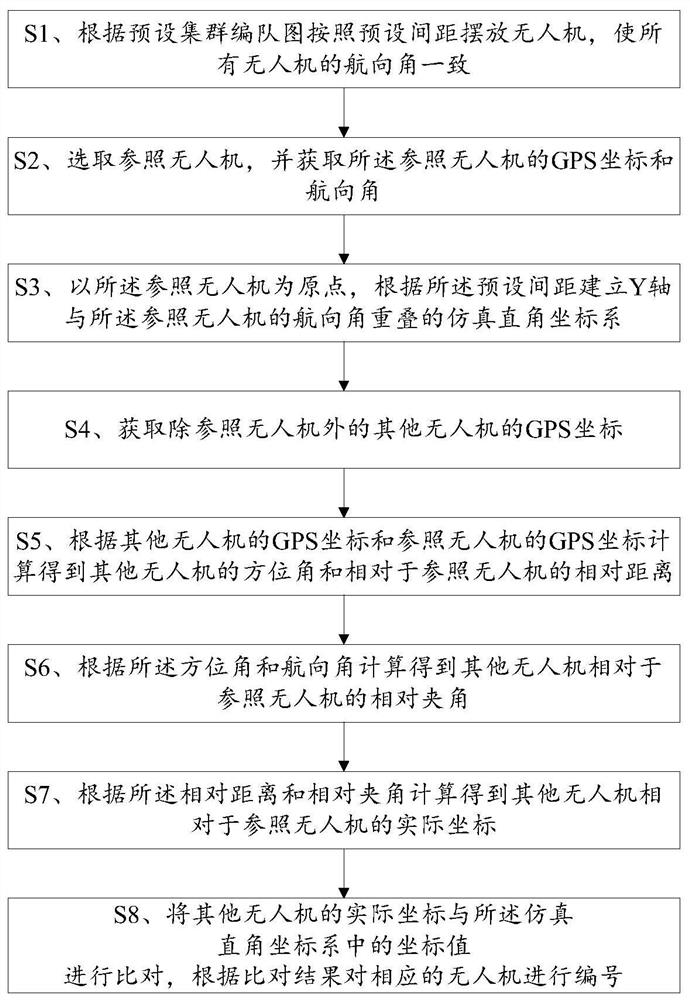
[0083] Please refer to figure 1 , Embodiment 1 of the present invention is a method for numbering cluster drones, comprising the following steps:
[0084] S1. According to the preset cluster formation diagram, the UAVs are arranged according to the preset spacing, so that the course angles of all the UAVs are consistent.
[0085] The UAV used in this embodiment is an RTK differential positioning UAV. Before placing the UAV, the UAV needs to be powered on. The cluster formation diagram can be designed as required, for example, it can be designed as a rectangle, and the The spacing can be set as required, for example, it can be 1m. In addition, before step S1, it is necessary to obtain the total number of UAVs. According to the total number, the number of rows and columns of the rectangular formation diagram can be designed, which is also conducive to the subsequent judgment of the completion of the numbering.
[0086] S2. Select a reference drone, and acquire the GPS coordina...
Embodiment 2
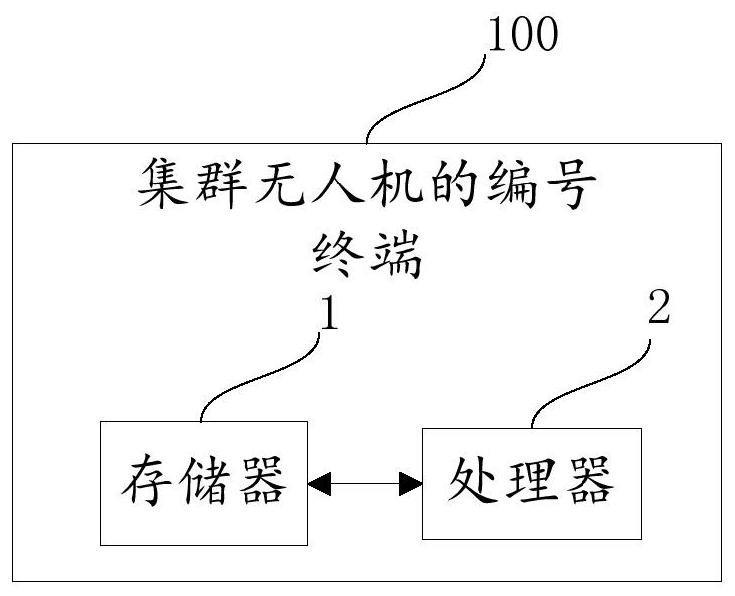
[0110] Please refer to image 3 , Embodiment 2 of the present invention is a numbering terminal 100 for cluster drones, corresponding to the method of Embodiment 1, including a memory 1, a processor 2, and stored in the memory 1 and can be stored on the processor 2 A running computer program, the processor 2 implements the following steps when executing the computer program:
[0111] According to the preset cluster formation diagram, arrange the UAVs according to the preset spacing, so that the heading angles of all UAVs are consistent;
[0112] Select a reference drone, and obtain the GPS coordinates and heading angle of the reference drone;
[0113] Taking the reference UAV as the origin, establishing a simulated Cartesian coordinate system in which the Y axis overlaps with the course angle of the reference UAV according to the preset distance;
[0114] Obtain the GPS coordinates of other UAVs except the reference UAV;
[0115] According to the GPS coordinates of other dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More