

Elevator system self-learning optimal control method and system based on deep reinforcement learning
An elevator system and reinforcement learning technology, applied in neural learning methods, constraint-based CAD, complex mathematical operations, etc., can solve problems such as the inability to achieve optimal control of elevator efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
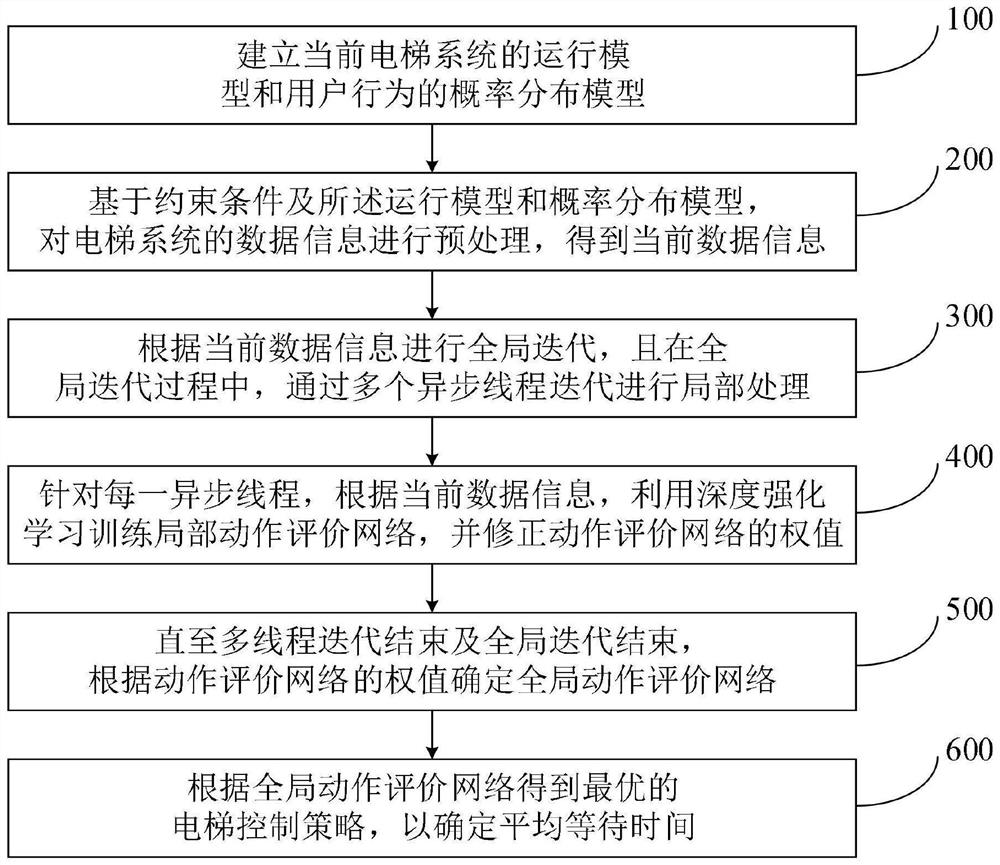
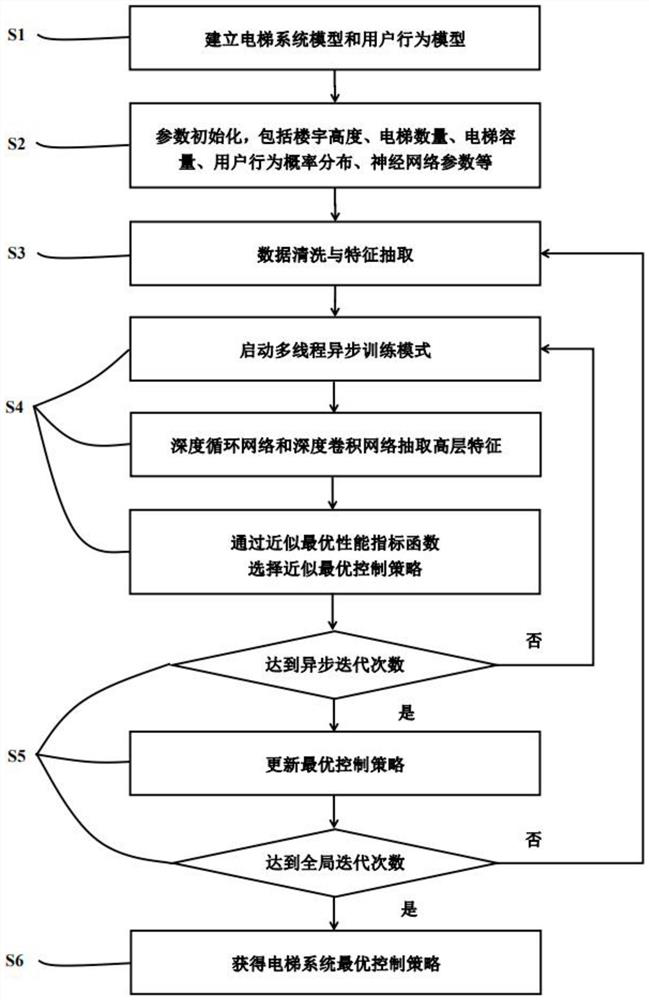
[0075] The purpose of the present invention is to provide a self-learning optimal control method for an elevator system based on deep reinforcement learning. Based on constraints, operating models and probability distribution models, the data information of the elevator system is preprocessed to obtain current data information, and further The global iteration is performed according to the current data information, and in the global iteration process, local processing is performed through multiple asynchronous thread iterations to determine the weight of the action evaluation network, and the optimal elevator control strategy is obtained throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More