

Target obstacle vehicle trajectory prediction method based on Bayesian network
A Bayesian network and trajectory prediction technology, which is applied in the direction of prediction, two-dimensional position/course control, vehicle position/route/height control, etc., and can solve the problem of poor trajectory accuracy of obstacles, inconsistent driving environment, neglect of influence, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
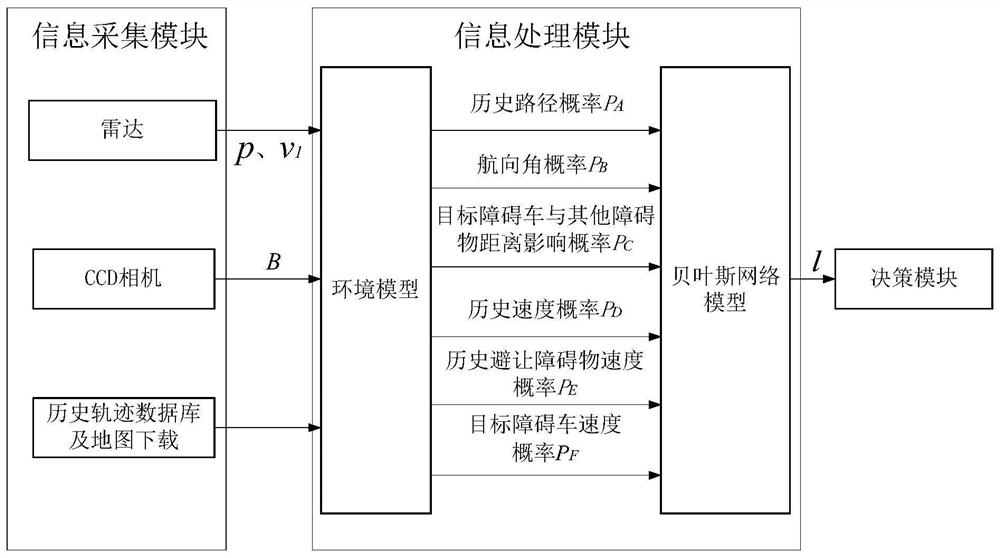
[0029] The present invention is first to construct such as figure 1 The prediction system shown is based on the Bayesian network model established by the naive Bayesian network, and predicts and estimates the trajectory of the target obstacle vehicle through the Bayesian network model. The prediction system is mainly composed of an information collection module, an information processing module and a decision-making module connected in series. Among them, the information collection module includes radar, CCD camera, historical trajectory database and map downloading part, and the information processing module includes the environment model and Bayesian network model connected in sequence.
[0030] The radar part is responsible for collecting the current position P of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More