

Human-vehicle collision risk degree analysis method based on autonomous vehicle
A technology of automatic driving and analysis method, applied in anti-collision systems, instruments, data processing applications, etc., can solve the problems of sudden changes in street crossing behavior and low prediction accuracy of collision conflicts, and achieve specific and accurate estimates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
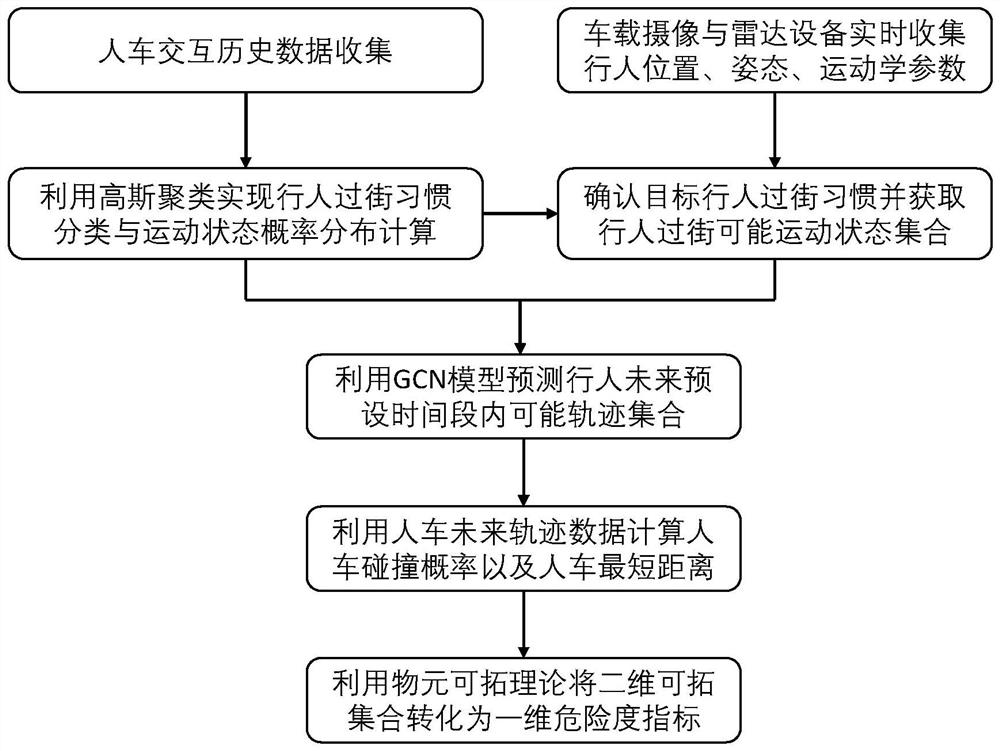
[0092] combine figure 1 , a method for analyzing the risk of human-vehicle collision based on an autonomous vehicle, comprising the following steps:
[0093] Step 1. Obtain the crossing characteristics in the pedestrian crossing historical data set, including speed, acceleration and crossing heading angle, and use the Gaussian mixture clustering GMM method to construct a Gaussian mixture distribution function to represent three different pedestrian crossing habits, specifically:
[0094] Obtain the motion parameters of pedestrians crossing the street with human-vehicle game through the existing data set, and extract the characteristics of crossing the street in the historical data set of pedestrians crossing the street, including speed, acceleration and heading angle of crossing the street;
[0095] The pedestrian trajectory heading angle refers to the angle formed between the pedestrian trajectory and the curb of the road. Since China adopts the right-hand driving system, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More