Fast path planning method, device and storage medium adapting to unknown dynamic space
A fast path and path planning technology, applied in two-dimensional position/course control, non-electric variable control, vehicle position/route/altitude control, etc. Sufficient, path planning algorithm is incompetent and other problems, to achieve the effect of reducing the number, ensuring optimality, and facilitating path following control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
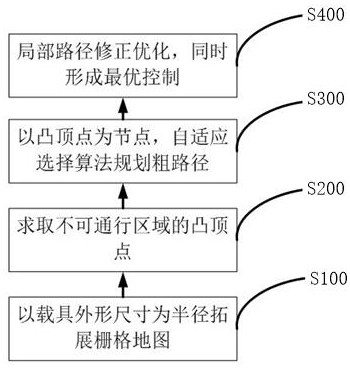
[0049] combined with figure 1 The schematic diagram further illustrates the fast path planning method of the embodiment of the present application, and the method includes the following steps:
[0050] Step S100
[0051] On the basis of the grid map, consider the size constraints of the vehicle to create an extended map.
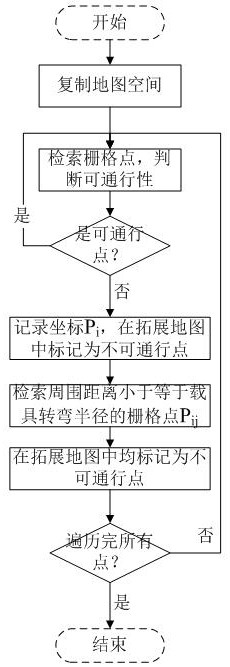
[0052] Specifically, in this example, the specific method of creating an extended map can be found in the following figure 2 The map expansion method flow shown is:
[0053] S110. Establish an empty map with the same spatial size as the original grid map as the extended map;
[0054] S120. Find the impassable grid point in the original grid map, and record its coordinate P i ;
[0055] S130, find P i All surrounding grid points P that satisfy the condition ij , such that P ij to P i The distance is less than or equal to the turning radius of the vehicle, record all coordinates P ij ;
[0056] S140, set the coordinates to P i and correspondingly ...
Embodiment 2
[0094] combined with Figure 5 The structural block diagram further illustrates the fast path planning device of the embodiment of the present application. The device includes: an extended map unit, a convex vertex unit, a rough path unit and a local planning control unit.
[0095] Specifically, in this example:
[0096] The extended map unit is connected to the convex vertex unit, the convex vertex unit is connected to the rough path unit, and the rough path unit is connected to the local planning control unit.
[0097] The extended map unit establishes an extended map based on the grid map based on the size constraints of the vehicle; the convex vertex unit obtains the convex vertex in the impassable area according to the extended map; the rough path unit takes the convex vertex as a node, and adaptively selects the path planning to obtain Rough path: The local planning control unit combines with the trajectory following control according to the characteristics of the local...
Embodiment 3
[0118] A computer-readable storage medium on which a computer program is stored, and when the computer program is run by a processor, the device where the storage medium is located is controlled to execute the fast path planning method adapting to an unknown dynamic space in the foregoing embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com