

Soft pneumatic robot capable of wriggling, and bending method of soft pneumatic robot
A robot and bending technology, which is applied in the field of medical devices, can solve the problems of microcapsules that cannot be actively bent, low efficiency of endoscopes, and large passive randomness, so as to reduce human tissue damage and achieve the effect of inspection speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
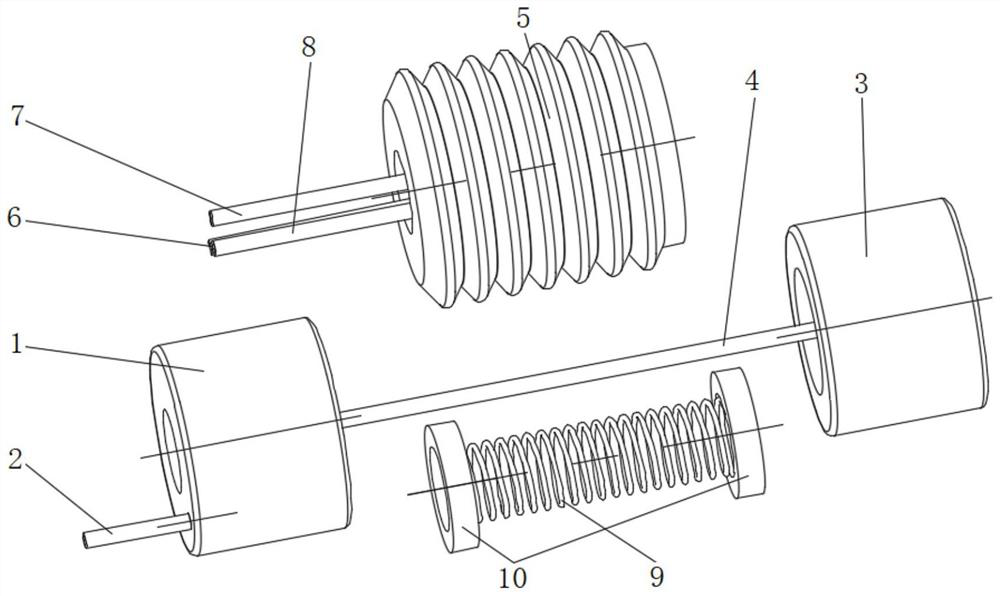
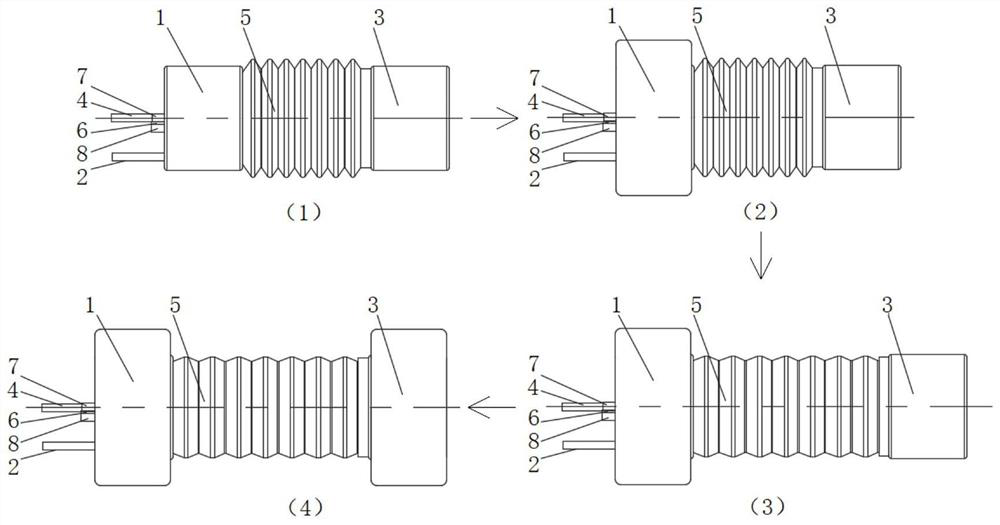
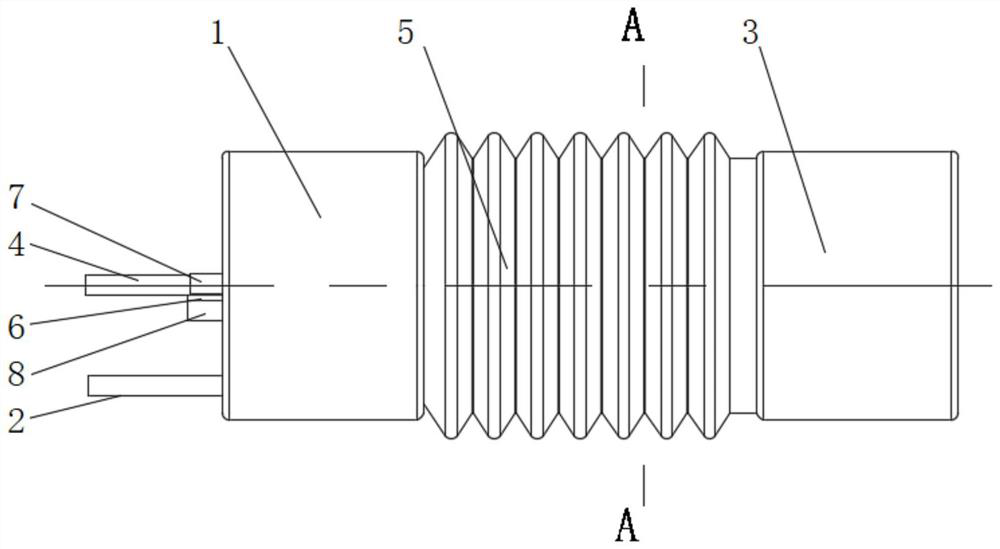
[0029] as attached Figure 1 to Figure 5 As shown, a soft pneumatic robot that can bend forward includes an annular air bag 1, a first air pipe 2, an air bag 3, a second air pipe 4, a telescopic tube 5, a third air pipe 6, a fourth air pipe 7, a fifth air pipe 8, Tension spring 9 and retaining ring 10.
[0030] The bottom of the annular airbag 1 is connected to the first trachea 2 , and the annular airbag 1 is inflated and deflated to shrink through the first trachea 2 . The middle of the annular airbag 1 is a through hole, the annular airbag 1 is wrapped on the shaft hub, and the second air pipe 4, the third air pipe 6, the fourth air pipe 7 and the fifth air pipe 8 are all placed on the shaft. inside the hub.
[0031] The bottom of the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More