

A High Precision Image Navigation and Positioning Method Based on Local Neighborhood Map
A technology of navigation and positioning, local neighborhood, applied in the field of visual navigation, can solve the problem that the scale information SLAM positioning data is difficult to meet the needs of navigation and positioning, and cannot provide geographic coordinates.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0064] A high-precision image navigation and positioning method based on a local neighborhood map, which specifically includes the following two stages;
[0065] Phase 1: Offline map mapping phase:
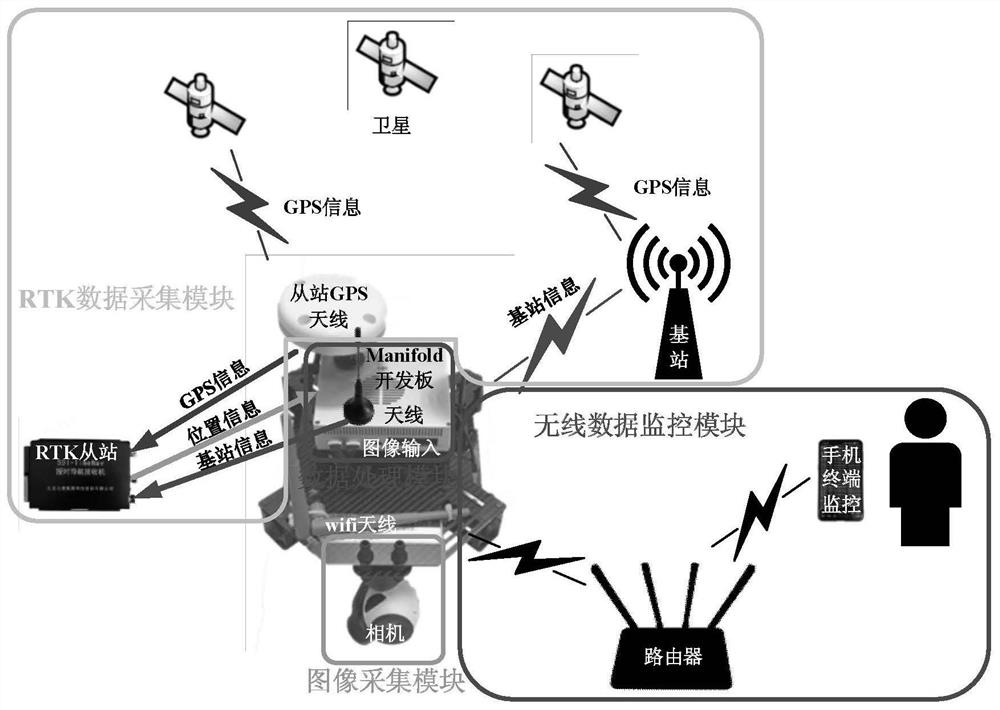
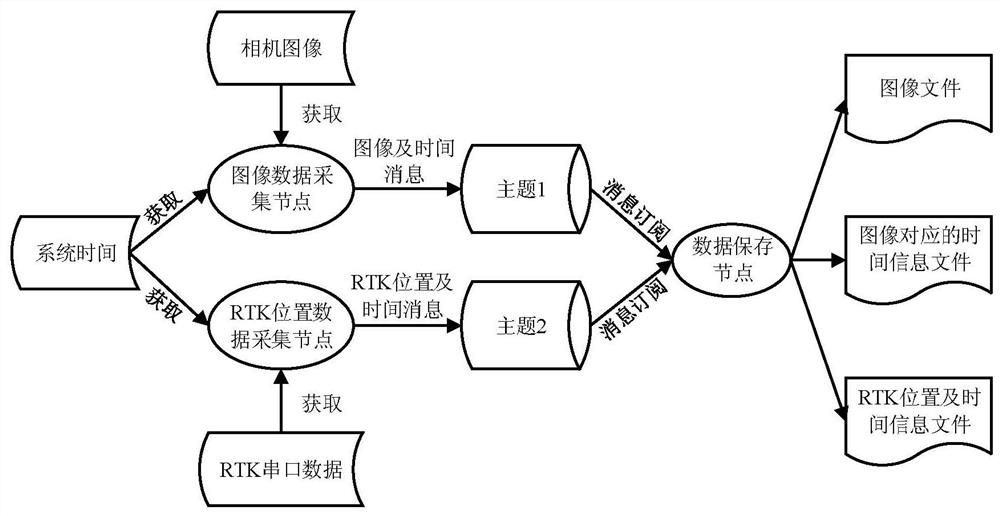
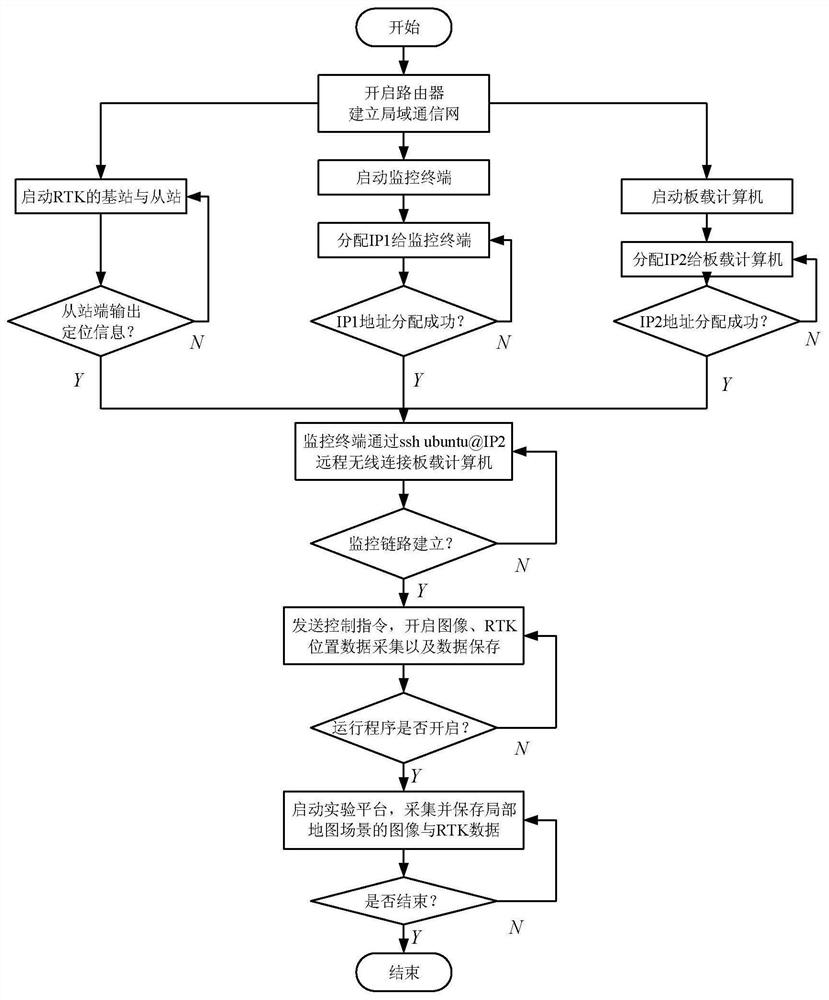
[0066] Step 1.1: collect raw data;
[0067] Step 1.2: Establish a visual location figure 1 and geographically figure 2 ;
[0068] Step 1.3: Build a visual / geographical coordinate mapping table;
[0069] Phase 2: Navigation and positioning phase:
[0070] Step 2.1: Calculate the position of the current frame image in the visual coordinate system;
[0071] Step 2.2: The extracted neighborhood coordinate mapping table, such as Figure 5 shown;
[0072] Step 2.3: Calculate the parameters of the similar transformation model, and obtain the carrier position information from the parameters
[0073] 1. Offline map surveying stage
[0074] 1.1 Collec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More